System Dynamics and Control: Module 27b - Choosing State Variables
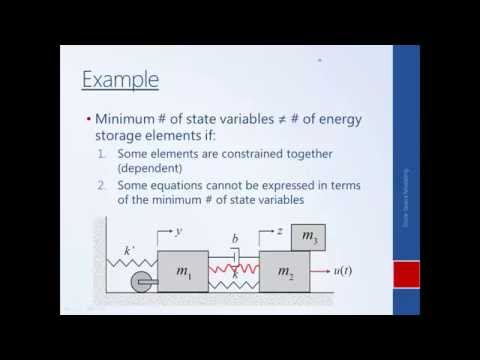
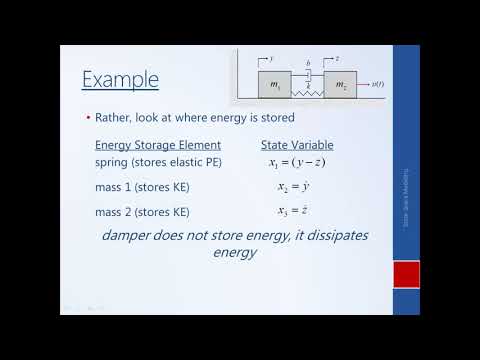
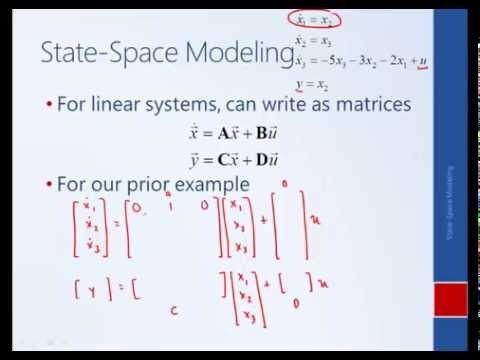
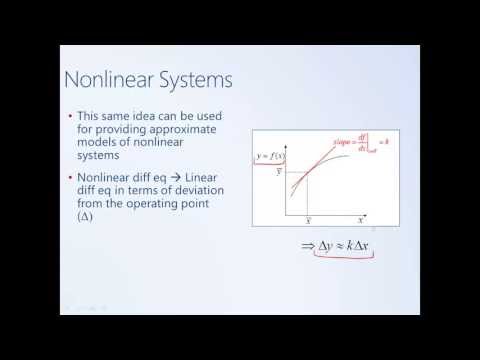
System Dynamics and Control Module 27b Choosing State Variables
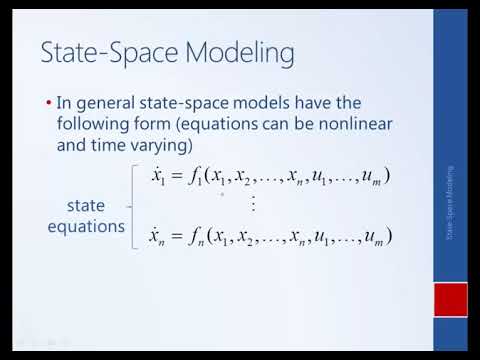
System Dynamics and Control: Module 27a - Introduction to State-Space Modeling
System Dynamics and Control: Module 12 - Non-Canonical Systems
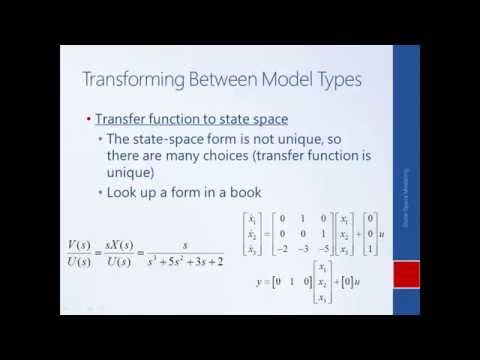
System Dynamics and Control: Module 27c - Transforming to and from State-Space Form
System Dynamics and Control Module 27d State Space Example
System Dynamics and Control: Module 27d - State Space Example
System Dynamics and Control Module 27c Transforming to and from State Space Form
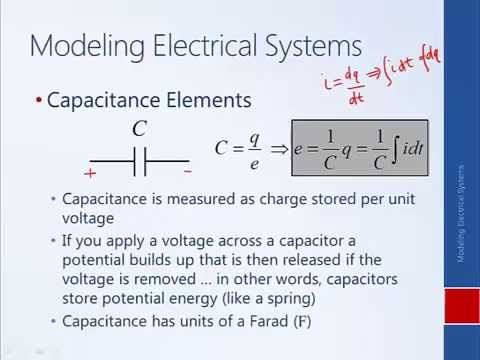
System Dynamics and Control: Module 6 - Modeling Electrical Systems
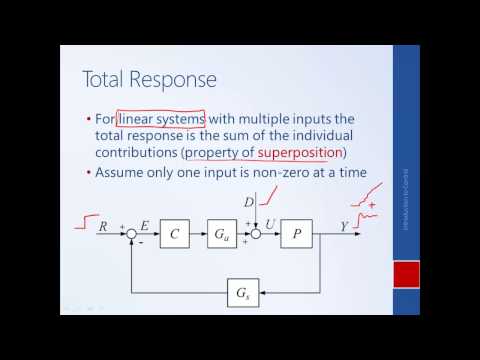
System Dynamics and Control: Module 13 - Introduction to Control, Block Diagrams
System Dynamics and Control Module 27a Introduction to State Space Modeling
State Space Representation for System Dynamics and Controls
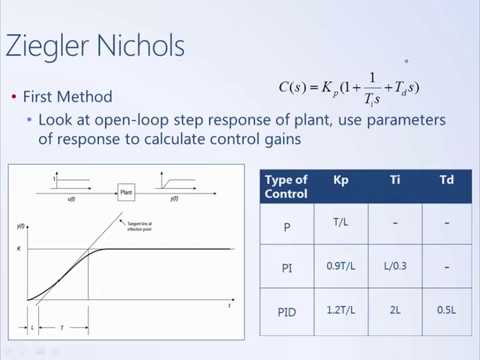
System Dynamics and Control: Module 26c - Design without a Model
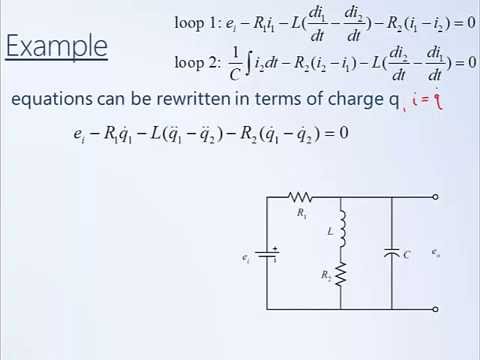
System Dynamics and Control: Module 6c - Circuit Modeling Example
ENGR 313 - 06.01 Second Order System Introduction
System Dynamics and Controls: Lecture 027 Laplace transform example.
System Dynamics and Control: Module 6a - Introduction to Electrical Circuits
00.00 Course introduction and syllabus
System Dynamics and Control: Module 21 - Frequency Response for Analysis
System Dynamics and Control: Module 4 - Modeling Mechanical Systems