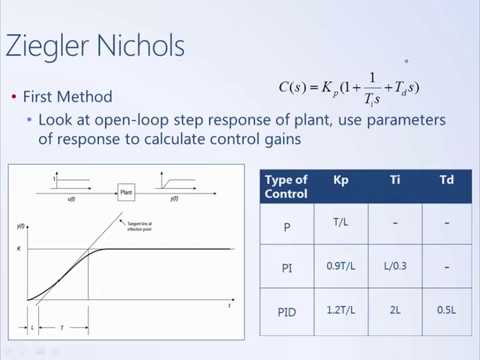
System Dynamics and Control: Module 26c - Design without a Model
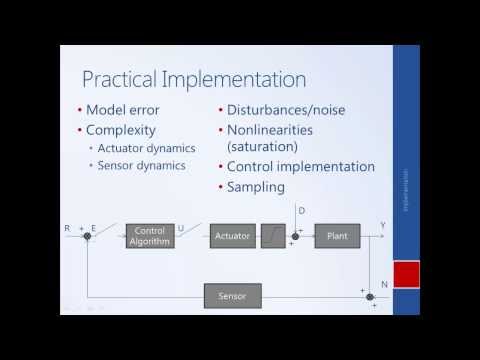
System Dynamics and Control: Module 26 - Implementation and Practical Considerations
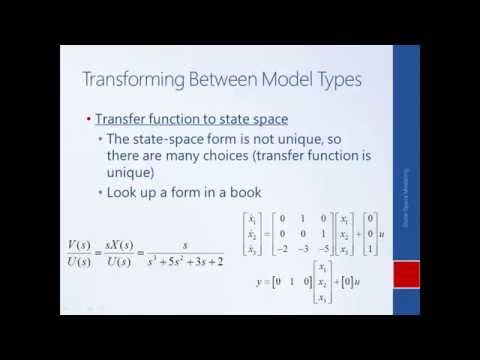
System Dynamics and Control: Module 27c - Transforming to and from State-Space Form
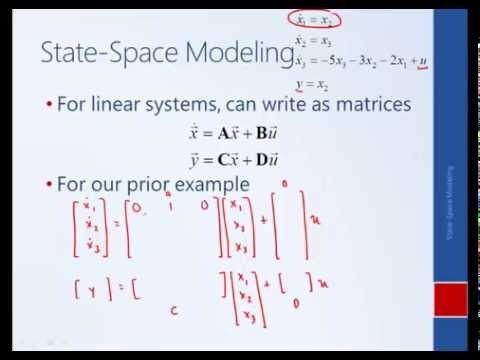
System Dynamics and Control: Module 27a - Introduction to State-Space Modeling
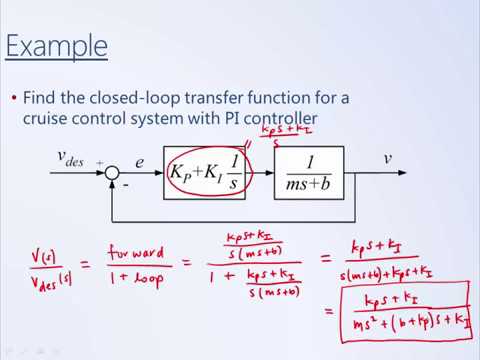
System Dynamics and Control: Module 14b - Design Example
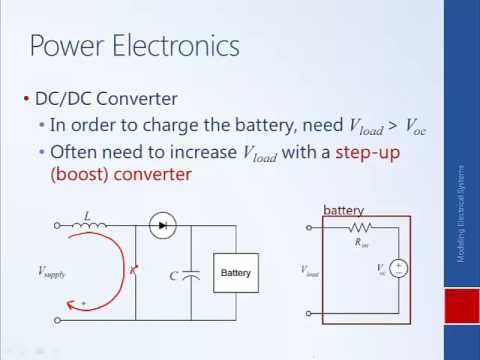
System Dynamics and Control: Module 6d - Introduction to DC/DC Converters
System Dynamics and Control: Module 4 - Modeling Mechanical Systems
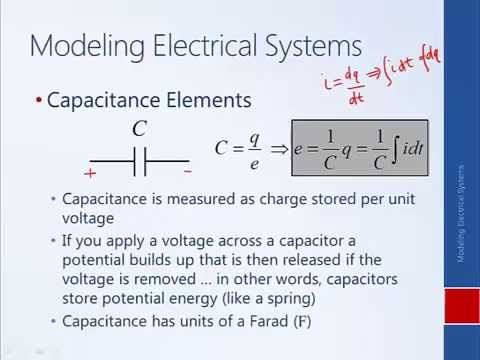
System Dynamics and Control: Module 6a - Introduction to Electrical Circuits
System Dynamics and Control: Module 21 - Frequency Response for Analysis
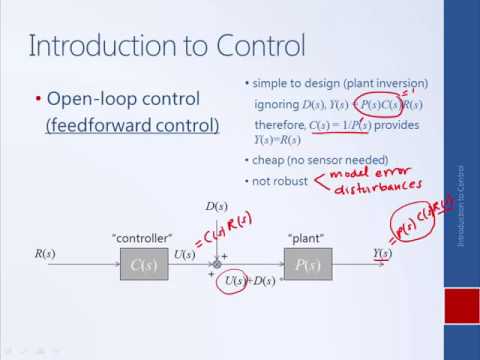
System Dynamics and Control: Module 13a - Introduction to Control
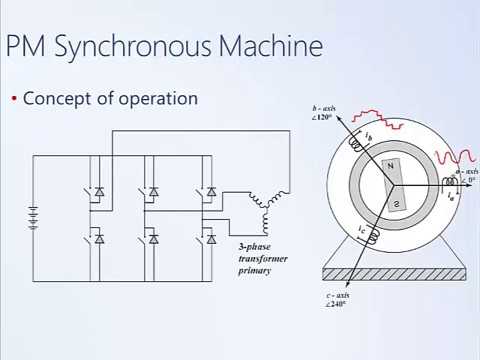
System Dynamics and Control: Module 9d - Comparison to AC Motors
M E 421: System Dynamics and Control
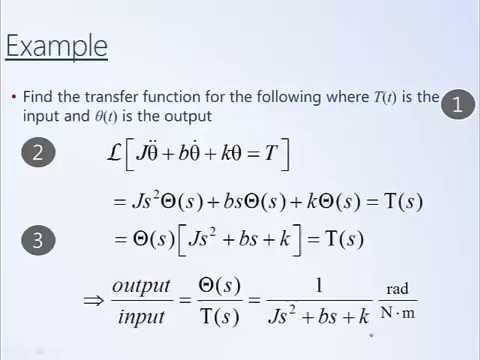
System Dynamics and Control: Module 5d - Introduction to Transfer Functions
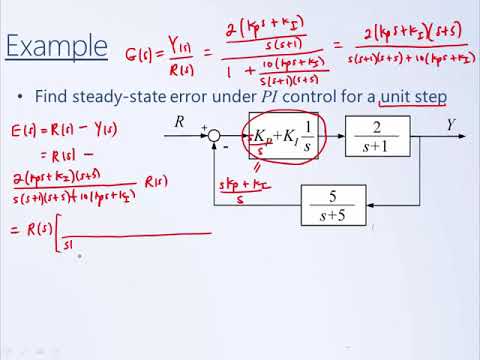
System Dynamics and Control: Module 16c - SS Error Example (PI Control)
System Dynamics and Control: Module 20c - Sketching Bode Example 2
System Dynamics and Control: Module 5a - More Solving Differential Equations
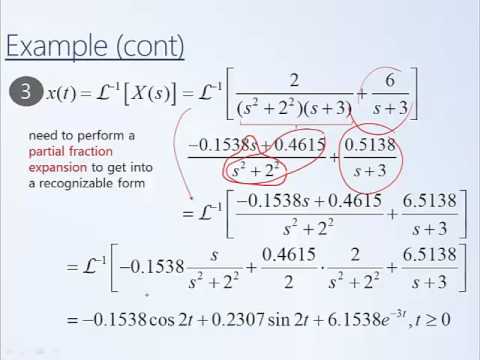
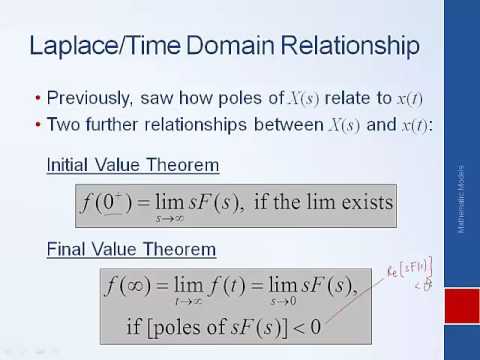
System Dynamics and Control: Module 3c - Relationship Between the Time and Laplace Domains
System Dynamics and Control: Module 23 - More Advanced Architectures
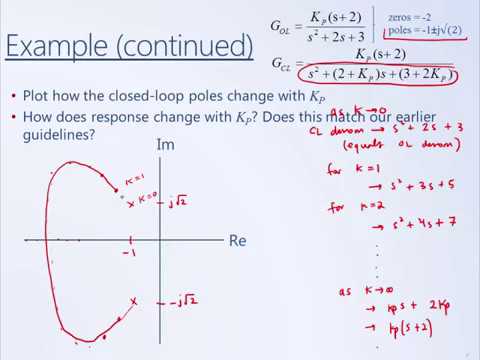
System Dynamics and Control: Module 17b - Illustrative Root Locus Example
System Dynamics and Control: Module 21c - Bode Diagrams with MATLAB