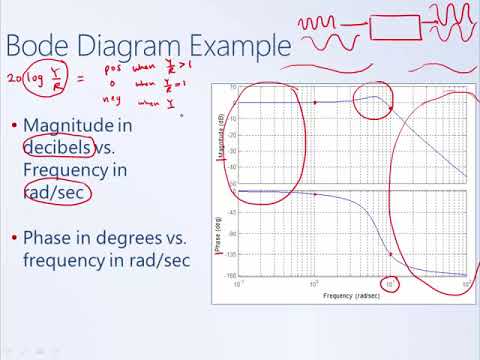
System Dynamics and Control: Module 19b - Introduction to Bode Diagrams
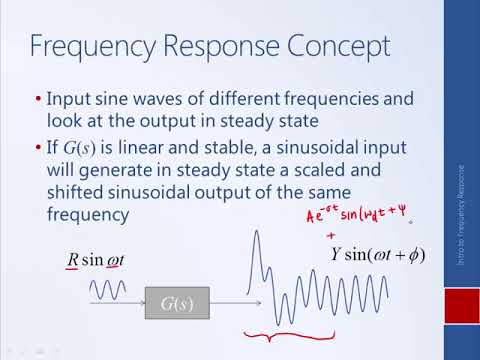
System Dynamics and Control: Module 19a - Concept of Frequency Response
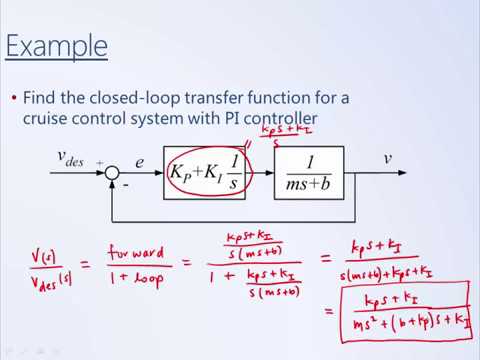
System Dynamics and Control: Module 14b - Design Example
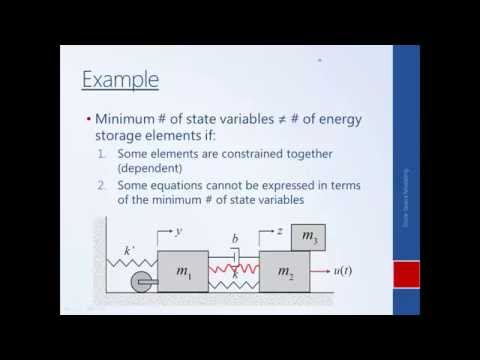
System Dynamics and Control: Module 27b - Choosing State Variables
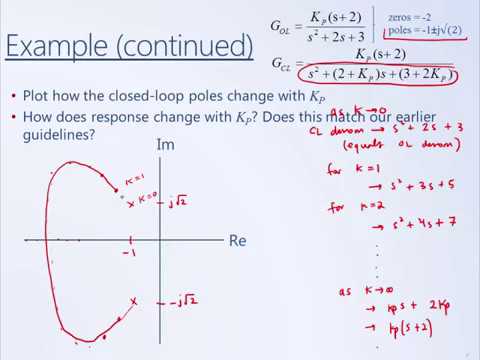
System Dynamics and Control: Module 17b - Illustrative Root Locus Example
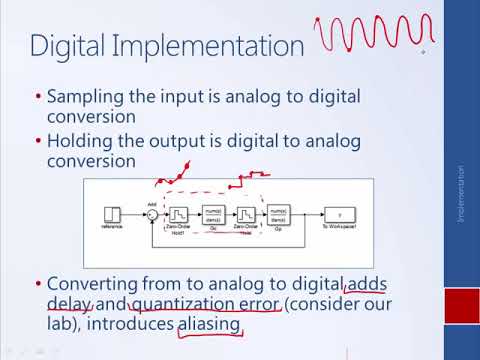
System Dynamics and Control: Module 26d - Controller Implementation
System Dynamics and Control: Module 20b - Sketching Bode Example 1
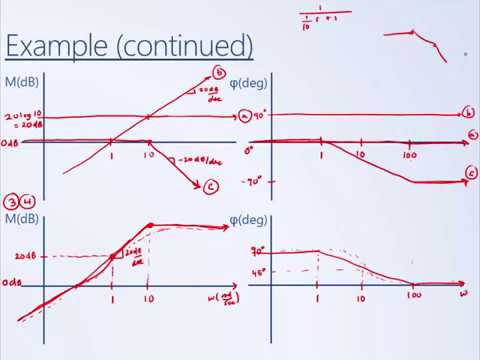
System Dynamics and Control: Module 20c - Sketching Bode Example 2
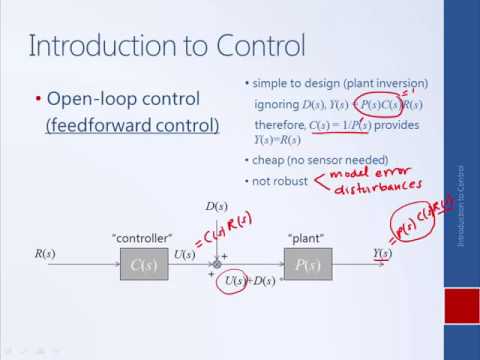
System Dynamics and Control: Module 13a - Introduction to Control
System Dynamics and Control: Module 14c - Intro to PID, P Control
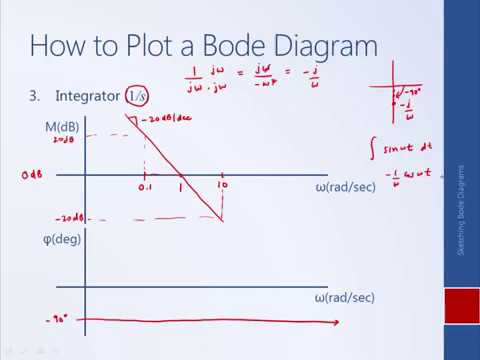
System Dynamics and Control: Module 20a - Sketching Bode Diagrams
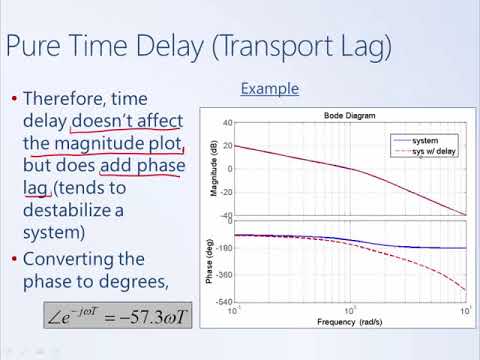
System Dynamics and Control: Module 22e - Pure Time Delay
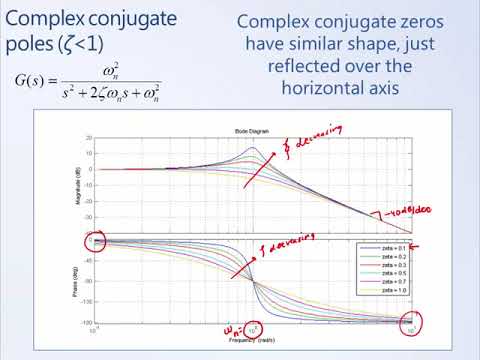
System Dynamics and Control: Module 20d - Bode Diagrams of Complex Poles and Zeros
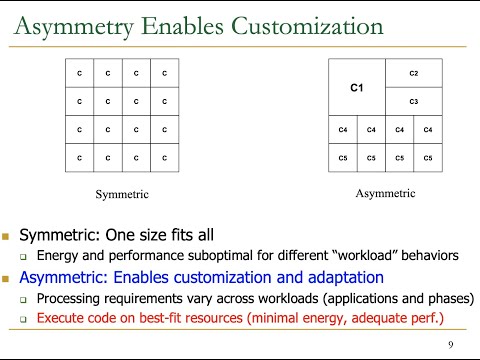
Computer Architecture - Lecture 19b: Heterogeneous Computing Systems (ETH Zürich, Fall 2019)
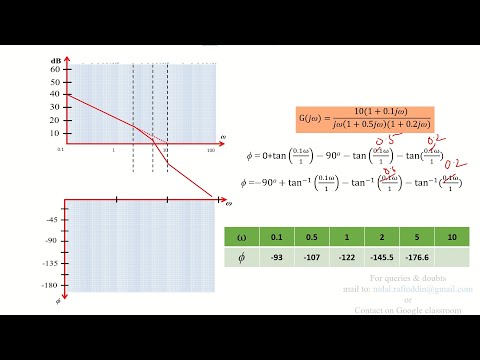
Lecture 46 Unit 4 Bode plot summary & Procedure to draw part 3 of 3
Obstacle Avoiding Robot in MATLAB
Introduction to Linearisation
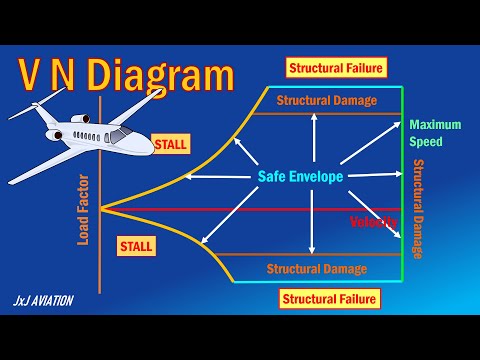
What is VN Diagram? | Relation between Velocity and Load Factor | What is Safe Envelope?
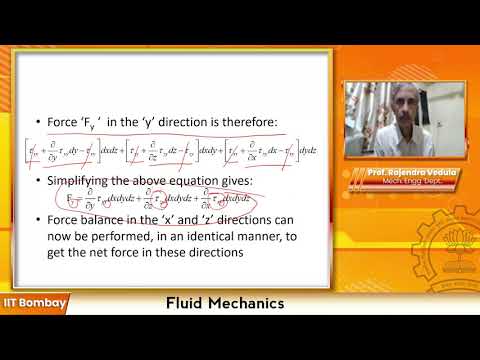
Review of Energy equation: Lecture-19B
TRUNCATION ERROR VS. ERROR BOUND FOR THE NUMERICAL INTEGRATION TRAPEZOIDAL RULE (ENGLISH)