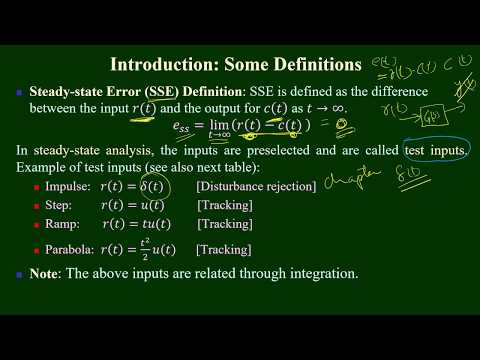
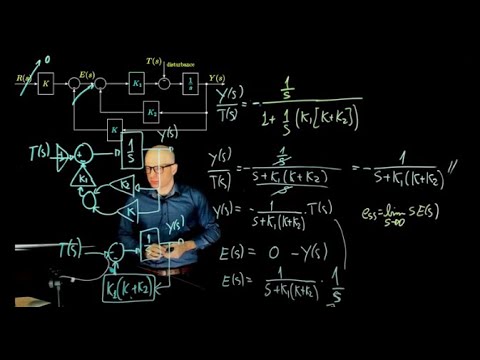
System Dynamics and Control: Module 16a - Intro to Steady-State Error
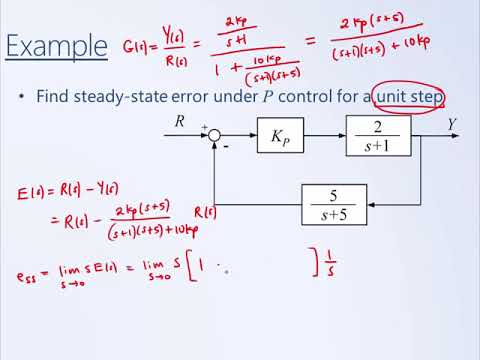
System Dynamics and Control: Module 16b - SS Error Example (P Control)
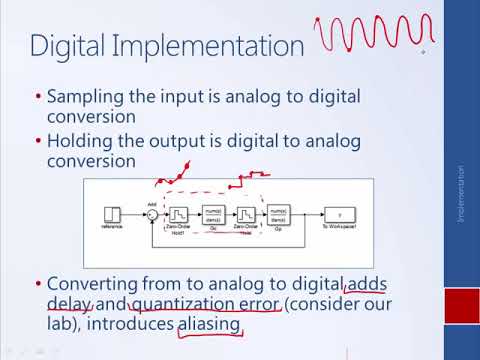
System Dynamics and Control: Module 26d - Controller Implementation
System Dynamics and Control: Module 22c - Other Considerations for Control Design
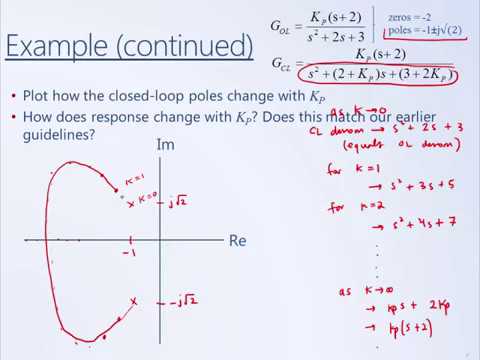
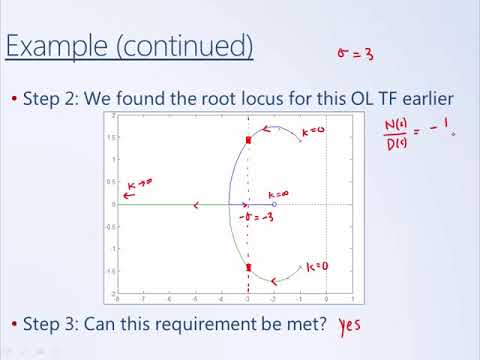
System Dynamics and Control: Module 17b - Illustrative Root Locus Example
System Dynamics and Control: Module 20c - Sketching Bode Example 2
System Dynamics and Control: Module 18a - Root Locus for Design
System Dynamics and Control: Module 14c - Intro to PID, P Control
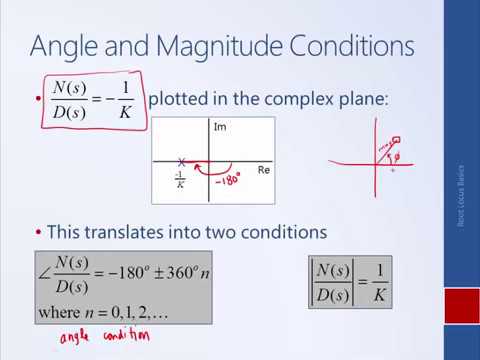
System Dynamics and Control: Module 17c - Angle and Magnitude Conditions
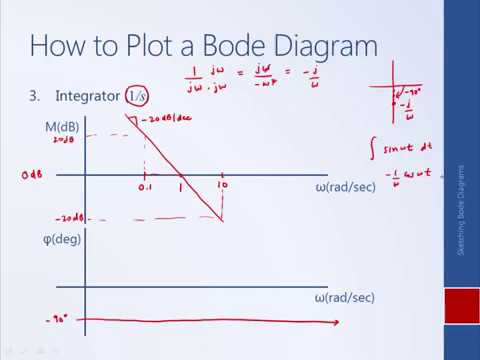
System Dynamics and Control: Module 20a - Sketching Bode Diagrams
EE 221A: Linear Systems Theory, Lecture 15b, 16a
3 2 State Space Models Control of Mobile Robots
ME 357 16 A Selection of K
Robotics Lec 16a: Linear Control, State space, Pole Placement, LQR (1 of 2) (Fall 2022)
Introduction to Steady State Error part 1
10 - Response of SDF Systems to General Dynamic Loading - Step-by-step Direct Integration Method
How does the single-function time relay work | Geya Electric
16 - A Solved Example - Equations of Motion of an MDF System using the Lagrange's Equation
Biomedical systems modelling and control - Lecture 18 - Steady-state error of closed loop systems
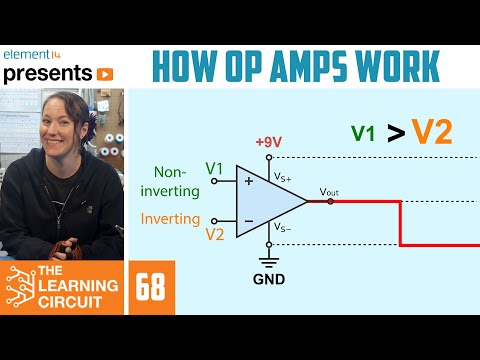
How Op Amps Work - The Learning Circuit