System Dynamics and Control: Module 16 - Steady-State Error
System Dynamics and Control: Module 16a - Intro to Steady-State Error
System Dynamics and Control: Module 16d - System Type
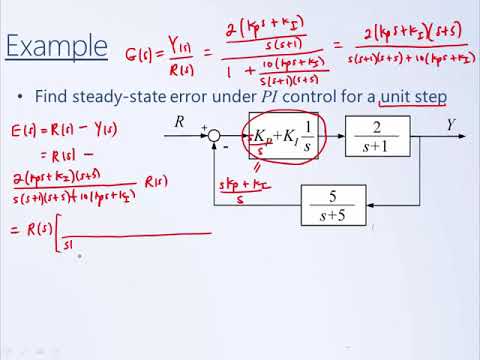
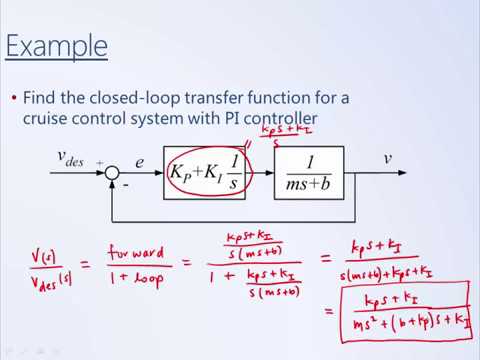
System Dynamics and Control: Module 16c - SS Error Example (PI Control)
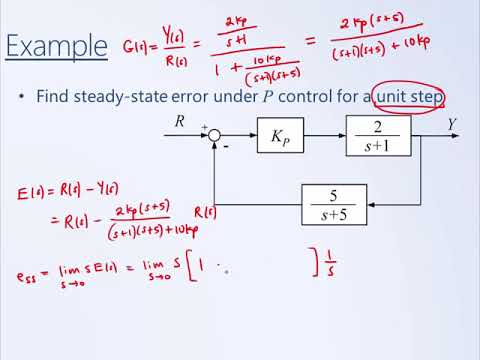
System Dynamics and Control: Module 16b - SS Error Example (P Control)
Introduction to System Dynamics: Overview
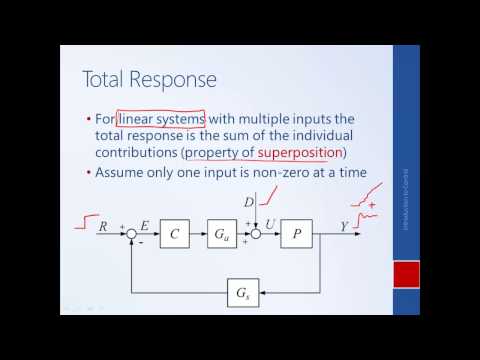
System Dynamics and Control: Module 5e - Introduction to Block Diagrams and Time Response
System Dynamics and Control: Module 6 - Modeling Electrical Systems
System Dynamics: Lecture 16, Oscillating Time Response
System Dynamics and Control: Module 12 - Non-Canonical Systems
System Dynamics and Control: Module 14b - Design Example
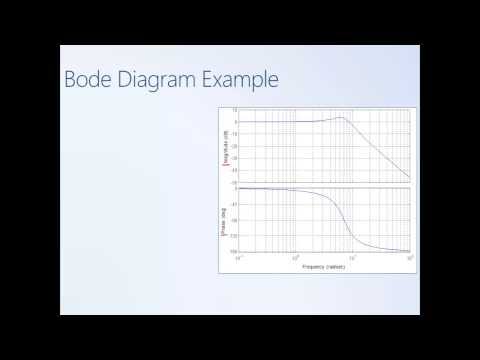
System Dynamics and Control: Module 19 - Introduction to Frequency Response
System Dynamics and Controls: Lecture 4.1 Steady-state error introduction.
System Dynamics and Control: Module 4 - Modeling Mechanical Systems
System Dynamics and Control: Module 13 - Introduction to Control, Block Diagrams
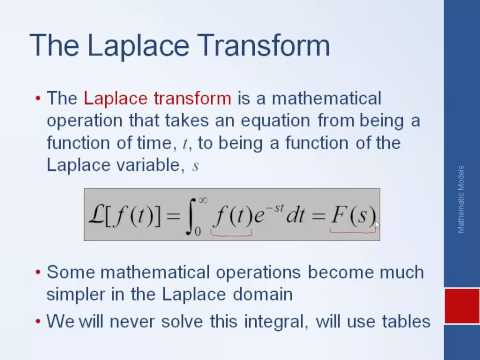
System Dynamics and Control: Module 3 - Mathematical Modeling Part I
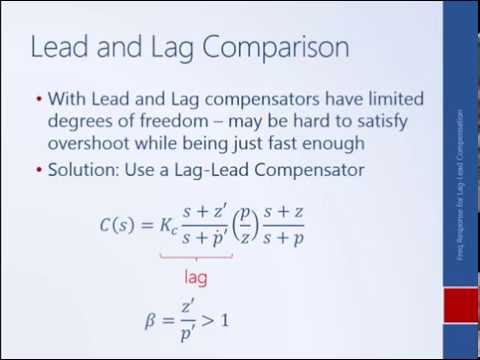
Controls II: Module 16 - Designing Lag-Lead Compensators in the Frequency Domain
System Dynamics and Control: Module 11 - Stability and Second-Order Systems
System Dynamics and Control: Module 21 - Frequency Response for Analysis
System Dynamics and Control: Module 7 - Modeling Challenges