Spacial Descriptions and Transformations - Worked Example
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
SYSC 4206 (Surgical Robotics) - Lecture 2: Spatial descriptions and rigid transformations
S1 - Spatial Transformations: Description of Position and Orientation of a Body
Spatial Descriptions - TRANSFORMATION 2 , ROBOTICS and AUTOMATION Course
Lecture Two || Robotic Systems || Chapter Two: Spatial Descriptions and Transformations ||Part One
Lecture Five || Robotic Systems || Chapter Two: Spatial Descriptions and Transformations || Part 4
Lecture Six|| Robotic Systems || Chapter Two: Spatial Descriptions and Transformations || Part 5
EENG 510 - Lecture 04-1 Spatial Transformations
Lecture Four || Robotic Systems || Chapter Two: Spatial Descriptions and Transformations || Part 3
Spatial Descriptions-TRANSFORMATION 1, ROBOTICS and AUTOMATION Course
Lecture - 2 .1 - Kinematics- Coordinate transformations
Introduction to Robotics - Spatial Transformation (Lecture 1)
Homogeneous Transformation Matrices in Robotics | Fundamentals of Robotics | Lesson 14
Introducing Coordinate Systems and Transformations
S2 - Spatial Transformations: Homogeneous Transform I
Spatial Transformation
S6 - Spatial Transformations: Matlab Session on Effect of Rotation wrt Fixed vs Moving Frame of Ref
Deep Image Spatial Transformation for Person Image Generation
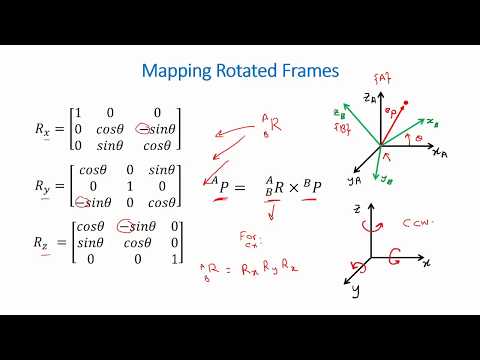
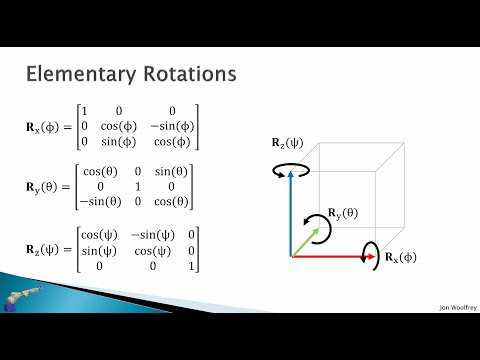
2.3 Rotations in 3D