Robust Manipulation in Clutter - Mark Cutkosky
Lecture 8: MIT 6.800/6.843 Robotics Manipulation (Fall 2021) | "Manipulation in Clutter" (part 1)
Robust Object Grasping in Clutter via Singulation
[IROS2023 Accepted] Probabilistic Slide-support Manipulation Planning in Clutter
Manipulating Known and Unknown Objects, Dieter Fox
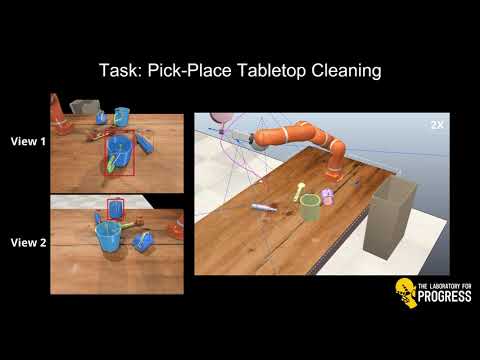
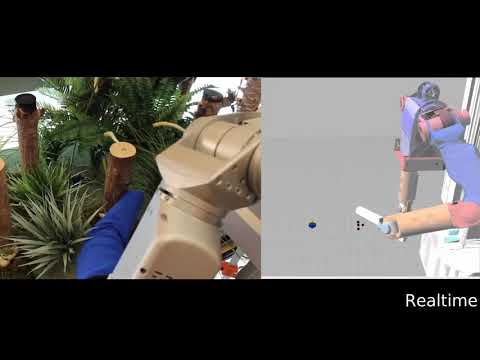
Learning Physics Based Manipulation in Clutter
Task and motion planning for object manipulation in clutter
Manipulation in cluttered environments and interacting with robots by Tony Cohn
Split Deep Q-Learning for Robust Object Singulation
Video of "Manipulation-Oriented Object Perception in Clutter through Affordance Coordinate Frames"
Planning with a Receding Horizon for Manipulation in Clutter using a Learned Value Function
Autonomous manipulation in a cluttered environment using whole arm tactile sensing
Physically Plausible Scene Estimation for Manipulation in Clutter - ProgressLab at Michigan
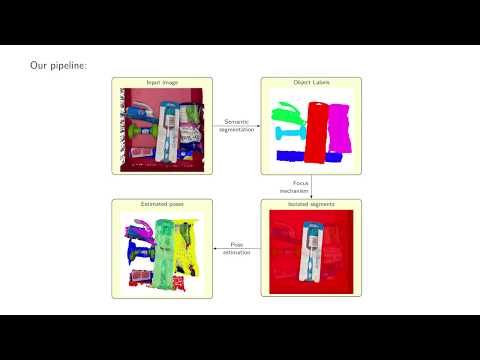
Robust 6D Object Pose Estimation in Cluttered Scenes
Learning Push-Grasping in Dense Clutter
Learning Goal-Directed Object Pushing in Cluttered Scenes With Location-Based Attention
Robotic Object Manipulation in Cluttered Environments
ICRA 2020 Talk - 6-DOF Grasping for Target-driven Object Manipulation in Clutter
RI Seminar: Sidd Srinivasa: Robotic Manipulation...
Manipulation with Shared Grasping [RSS2020 Video Summary]

![[IROS2023 Accepted] Probabilistic Slide-support Manipulation Planning in Clutter](https://img.youtube.com/vi/Qyes4hjCP3w/0.jpg)







![Manipulation with Shared Grasping [RSS2020 Video Summary]](https://img.youtube.com/vi/tyNhJvRYZNk/0.jpg)