Robot Reference Frames - RoboDK Documentation
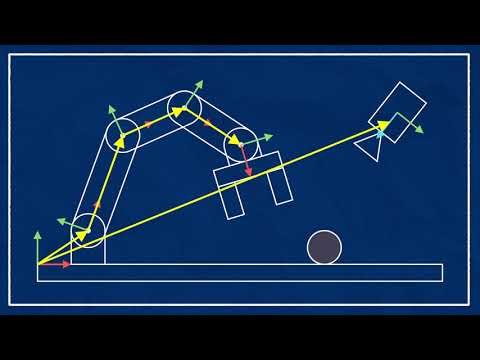
Robot degree of freedom, Robot reference frames
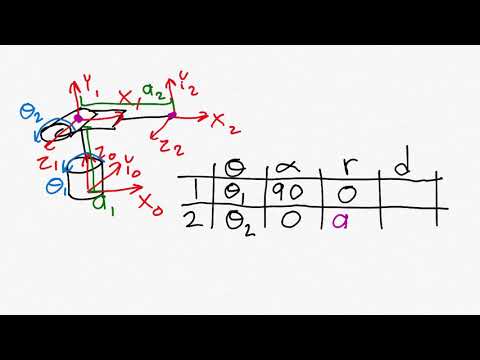
Denavit-Hartenberg Reference Frame Layout
4.3 Reference Frames
Frame Assignment For Robotic Manipulators - Direct Kinematics I
How to Move Reference Frames - Tips & Tricks
How to Position your Part for Accurate Robot Offline Programming - Ref Frame Definition - RoboDK
Larger Reference Frames - Tips & Tricks
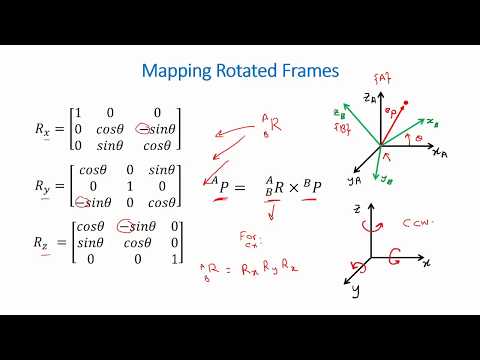
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
What is a Reference Frame ?
World Coordinate System of Robots Explained | The Robotics Channel
Coordinate Transformations - How robots move through space
Smaller Reference Frames - Tips & Tricks
How Do Frames Work on a Haas Robot? - Haas Automation, Inc.
Reference Frame - 1.09 - RoboDK Pro Training
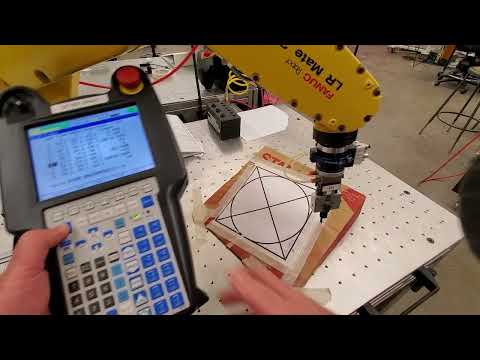
Fanuc Robot Tutorial 2: Defining User Frames and Moving in User Frames
The ROS Transform System (TF) | Getting Ready to Build Robots with ROS #6
Frames in Robotics - Tool frames (UTOOL)
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)
Introduction to Homogeneous Transforms in Robotics