mod05Lec25 - Mobile Robot Localisation
Robot Localization Made Simple: The First Step to Navigation
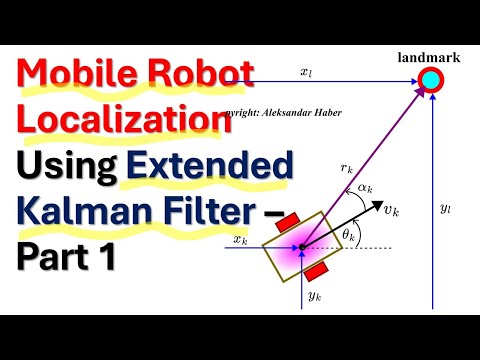
Mobile Robot Localization Using Extended Kalman Filter - Part 1: Problem Formulation
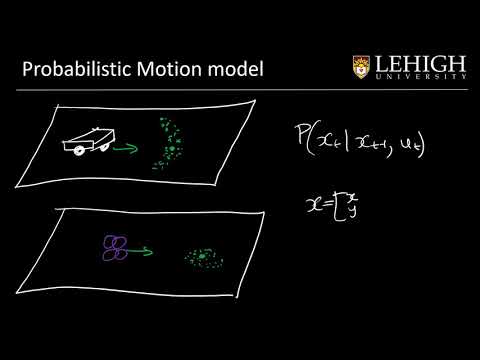
Mobile robotics - C6: Localization and Kalman filter
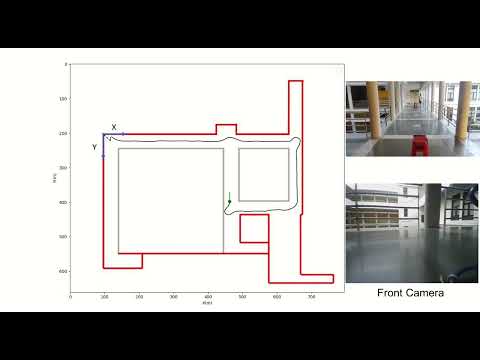
Indoor mobile robot : Localization
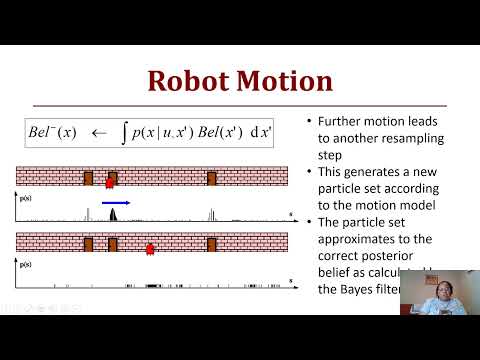
Advanced Mobile Robotics: Lecture 6-1c - Bayes Particle Filters (Monte Carlo Localization)
ECE 425 Mobile Robotics: Final Project - Localization Part II
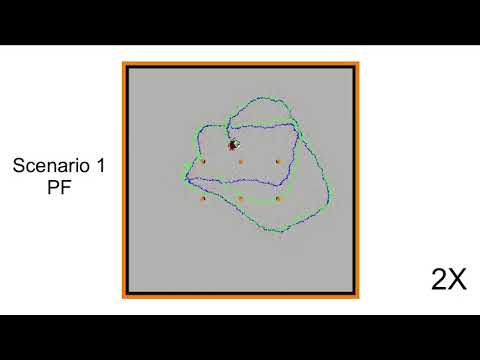
Mobile Robot Localization using Kalman Filter and Particle Filter
Advanced Mobile Robotics: Lecture 7-1a - Kalman Filters for Localization
Making robot navigation easy with Nav2 and ROS!
Understanding the Particle Filter | | Autonomous Navigation, Part 2
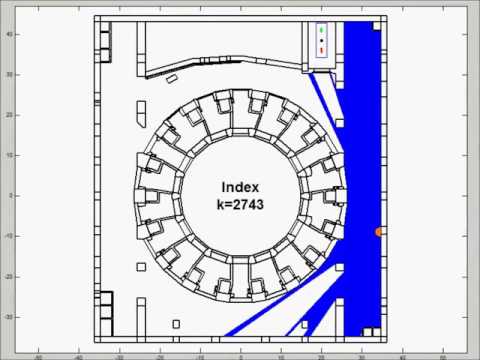
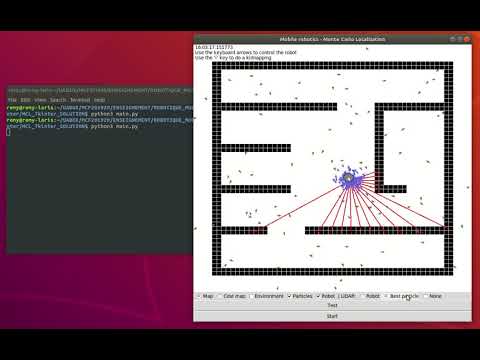
Mobile Robotics - Monte Carlo Localization
Advanced Mobile Robotics - Lecture 6-1b - Bayes Particle Filters (Monte Carlot Localization)
Robot Localization - An Overview (Cyrill Stachniss)
[202510] Mobile Robot Localization Using Pressure Sensors Under Floor
Autonomous Mobile Robot Localization and Pick and Drop
Mobile Robotics Localization
Michał Nowicki - Multi-Model Mobile Robot Localization | ML in PL 23
Mobile robot global localization based on lidar and geometry features (simulation)
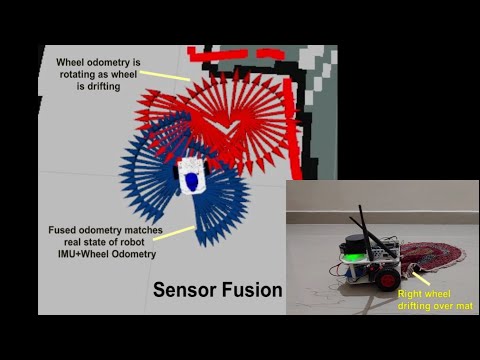
Sensor Fusion in Mobile Autonomous Robot | ROS | IMU+Wheel Odometry | Kalman Fliter | Jetson Nano
Mobile Robot localization by using Ackermann Steering control by ROS
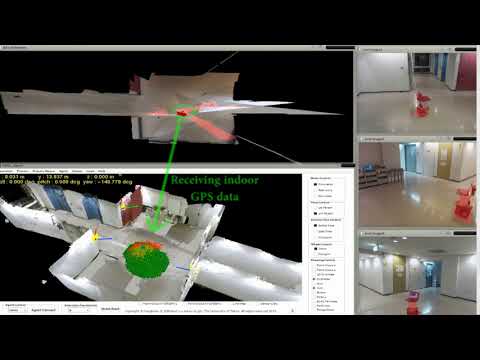
Indoor GPS for mobile robot localization
Experimental Test for Mobile Robot localization using Dead Reckoning
ITER mobile robot localization approaches
Mobile robot mapping and Localization





![[202510] Mobile Robot Localization Using Pressure Sensors Under Floor](https://img.youtube.com/vi/qSKpEYzsyDk/0.jpg)