MAE509 (LMIs in Control): Lecture 7, part D - Passivity, H_2 norm, and the Small-Gain Theorem
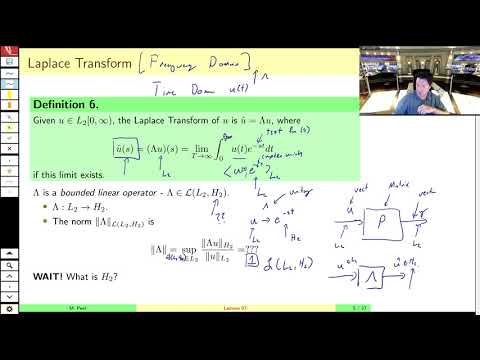
MAE509 (LMIs in Control): Lecture 7, part B - The Laplace Transform and the H_2/H_infty Signal Norms
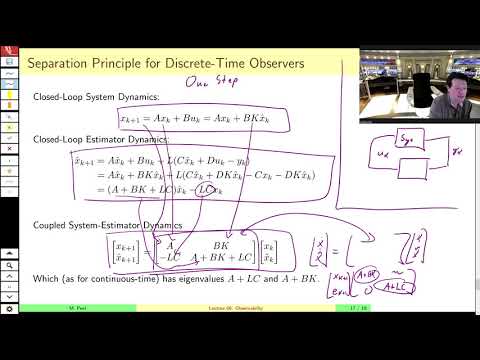
MAE509 (LMIs in Control): Lecture 6, part C - Discrete-Time Observers
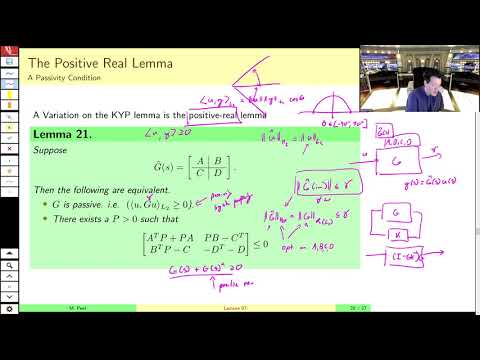
MAE509 (LMIs in Control): Lecture 7, part C - The KYP Lemma
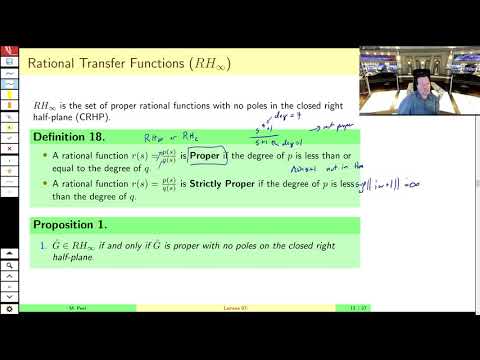
MAE509 (LMIs in Control): Lecture 7, part A - System and Signal spaces and Norms
MAE509 (LMIs in Control): Lecture 16, part C - Solving SOS problems using LMIs
MAE509 (LMIs in Control): Lecture 5, part D - Controllability in Discrete Time
MAE509 (LMIs in Control): Lecture 17, part B - The Dark Art of the Positivstellensatz
4 7 The Separation Principle Control of Mobile Robots
MAE509 (LMIs in Control): Lecture 16, part B - Sum-of-Squares (SOS)
MAE509 (LMIs in Control): Lecture 16, part A - Optimization of Polynomials
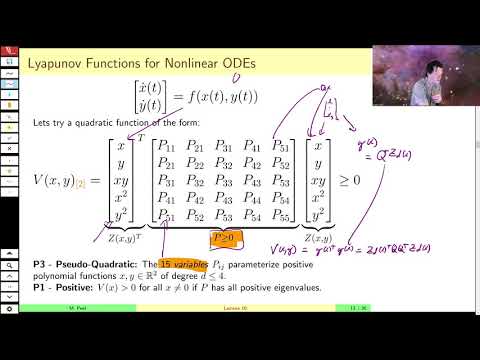
MAE509 (LMIs in Control): Lecture 15, part C - Lyapunov Functions
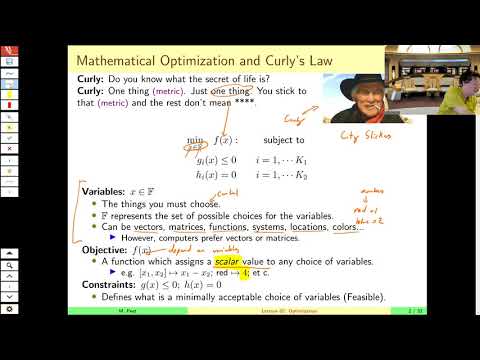
MAE509 (LMIs in Control): Lecture 2, part B - A Minicourse on Optimization
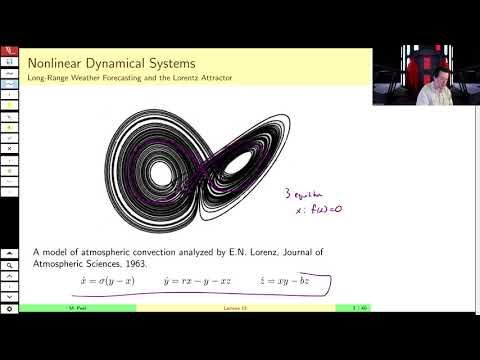
MAE509 (LMIs in Control): Lecture 15, part A - Intro to Nonlinear Systems, Existence and Uniqueness
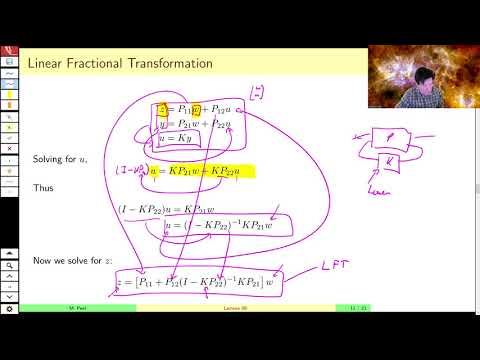
MAE509 (LMIs in Control): Lecture 8, part B - The Linear Fractional Transformation
01.1.1 Why norms? Part 1
MAE509 (LMIs in Control): Lecture 2, part A - A Minicourse in Optimization
Convergence and Sample Complexity of Gradient Methods for the Model-Free Linear Quadratic Regulator
MAE509 (LMIs in Control): Lecture 14, part B - LMIs for Robust Stability and Control using the LFT
MAE509 (LMIs in Control): Lecture 13, part B - LMIs for Quadratic Stability and Stabilization