MAE509 (LMIs in Control): Lecture 5, part C - An LMI for Static State Feedback Control
MAE509 (LMIs in Control): Lecture 5, part D - Controllability in Discrete Time
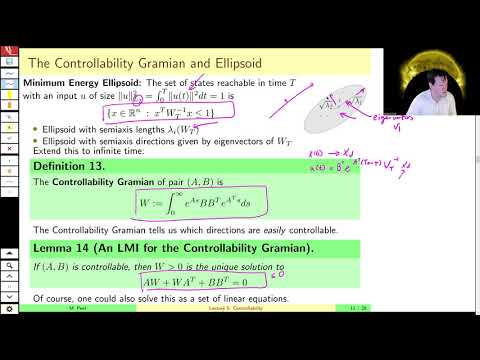
MAE509 (LMIs in Control): Lecture 5, part B - The Controllability Ellipsoid and Stabilization LMI
MAE509 (LMIs in Control): Lecture 16, part C - Solving SOS problems using LMIs
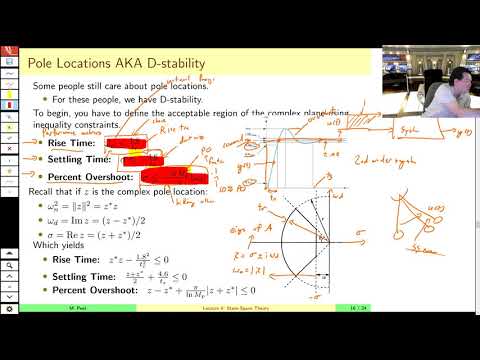
MAE509 (LMIs in Control): Lecture 4, part C - Optimizing eigenvalues using LMIs
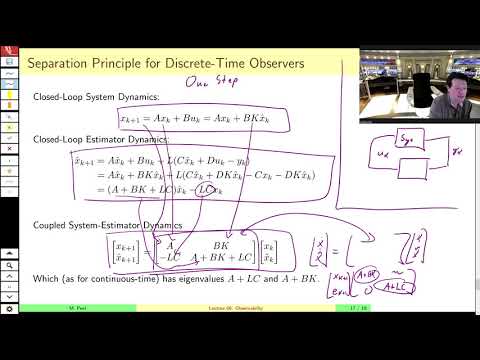
MAE509 (LMIs in Control): Lecture 6, part C - Discrete-Time Observers
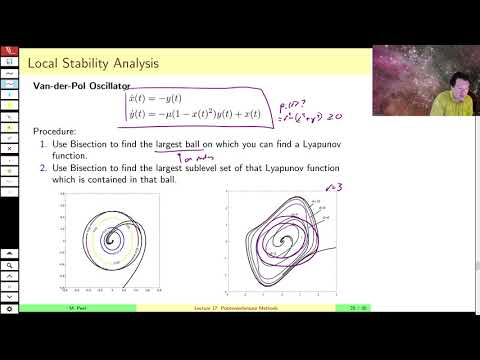
MAE509 (LMIs in Control): Lecture 17, part C - Local Stability Analysis using SOS
MAE509 (LMIs in Control): Lecture 5, part A - Controllability and the Grammian
MAE509 (LMIs in Control): Lecture 7, part C - The KYP Lemma
Autonomous Navigation for Flying Robots - Part 6.2 (Dr. Jürgen Sturm)
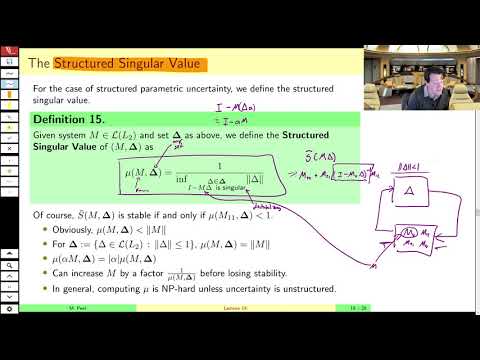
MAE509 (LMIs in Control): Lecture 14, part C - LMIs for Robust Control with Structured Uncertainty
MAE509 (LMIs in Control): Lecture 4, part B - Our first LMI, the Lyapunov Inequality
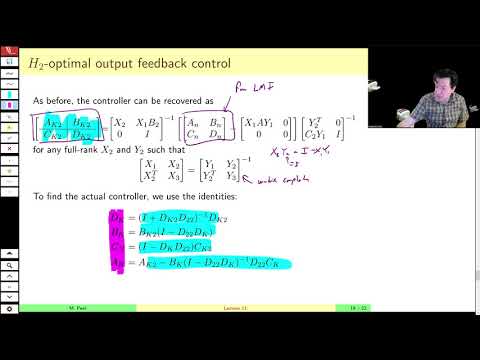
MAE509 (LMIs in Control): Lecture 11, part C - H2-Optimal Dynamic Output Feedback and Kalman Filters
AEE462 Lecture 10, Part C - A Bisection Algorithm for the Solution of Lambert's Equation
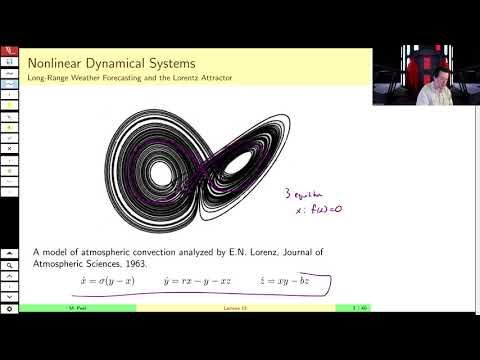
MAE509 (LMIs in Control): Lecture 15, part D - Optimization Problems in Nonlinear Systems
MAE509 (LMIs in Control): Lecture 6, part B - The Luenberger Observer Framework
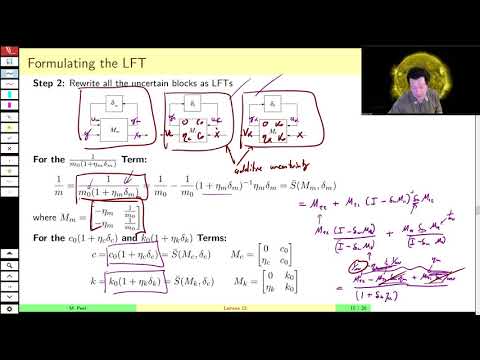
MAE509 (LMIs in Control): Lecture 12, part C - A Case Study in Formulating the LFT
MAE509 (LMIs in Control): Lecture 15, part A - Intro to Nonlinear Systems, Existence and Uniqueness
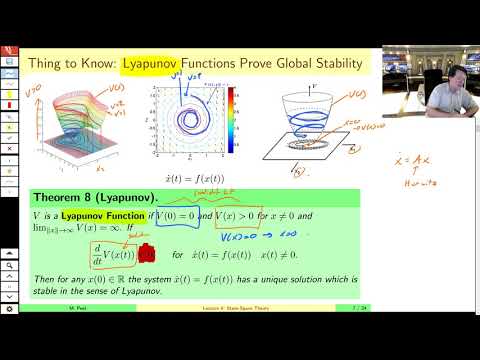
MAE509 (LMIs in Control): Lecture 15, part C - Lyapunov Functions
01.1.1 Why norms? Part 1