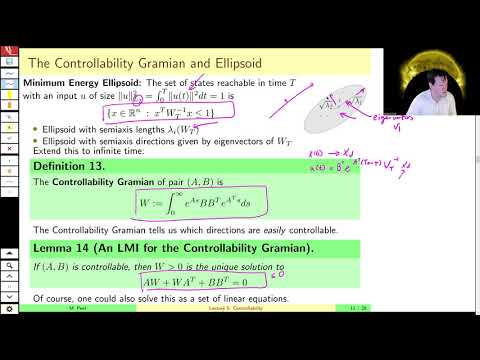
MAE509 (LMIs in Control): Lecture 5, part A - Controllability and the Grammian
MAE509 (LMIs in Control): Lecture 5, part D - Controllability in Discrete Time
MAE509 (LMIs in Control): Lecture 5, part B - The Controllability Ellipsoid and Stabilization LMI
MAE509 (LMIs in Control): Lecture 5, part C - An LMI for Static State Feedback Control
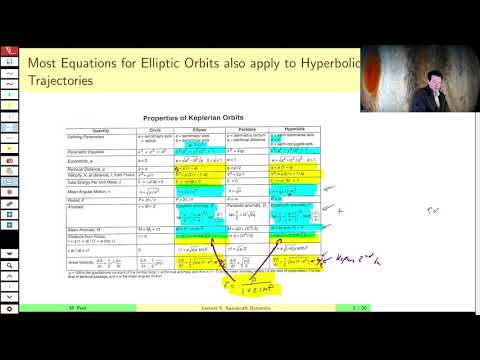
AEE462 Lecture 5, Part A - Moving Hyperbolic Orbits in Time
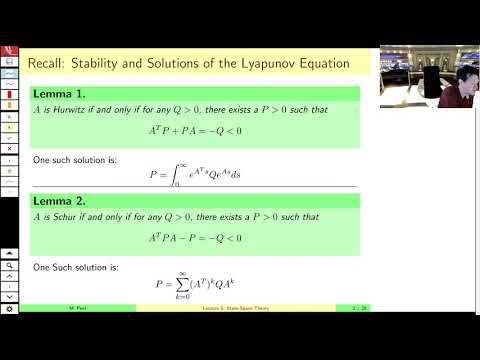
MAE509 (LMIs in Control): Lecture 4, part B - Our first LMI, the Lyapunov Inequality
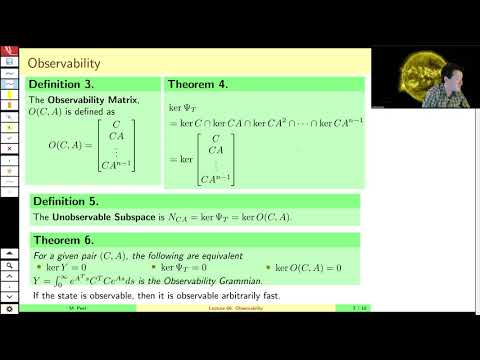
MAE509 (LMIs in Control): Lecture 6, part A - Observability and Duality
MAE509 (LMIs in Control): Lecture 7, part A - System and Signal spaces and Norms
MAE509 (LMIs in Control): Lecture 8, part A - The Optimal Control Framework
MAE509 (LMIs in Control): Lecture 16, part C - Solving SOS problems using LMIs
MAE509 (LMIs in Control): Lecture 4, part C - Optimizing eigenvalues using LMIs
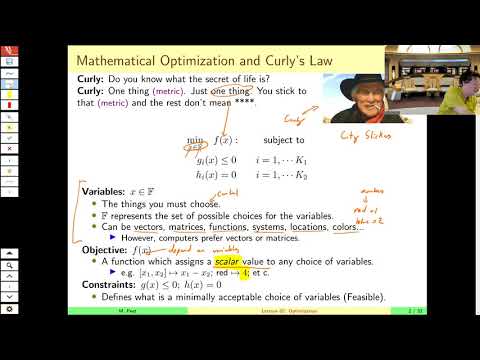
MAE509 (LMIs in Control): Lecture 2, part A - A Minicourse in Optimization
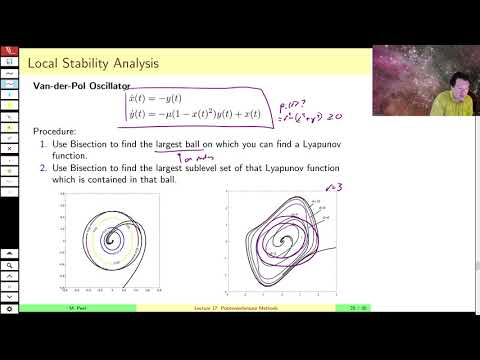
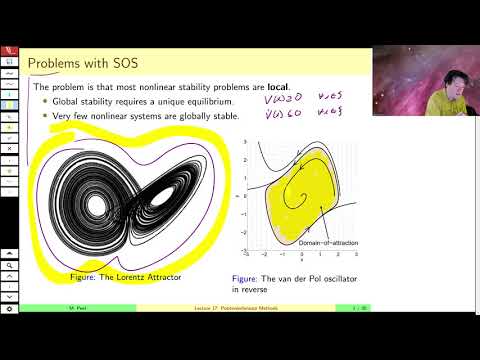
MAE509 (LMIs in Control): Lecture 17, part C - Local Stability Analysis using SOS
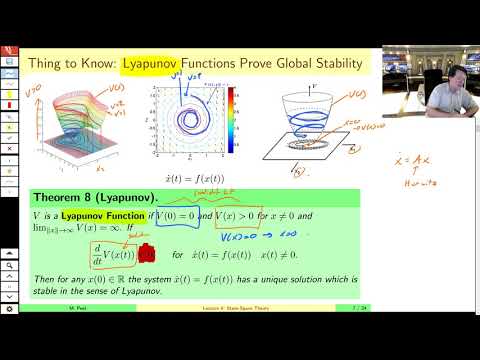
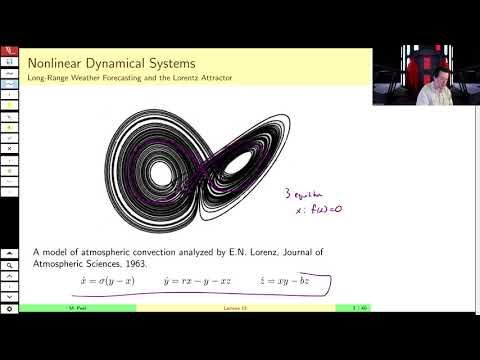
MAE509 (LMIs in Control): Lecture 15, part A - Intro to Nonlinear Systems, Existence and Uniqueness
MAE509 (LMIs in Control): Lecture 1, part A - The Big Picture
MAE509 (LMIs in Control): Lecture 17, part A - Local Polynomial Positivity and the Cone of Inference
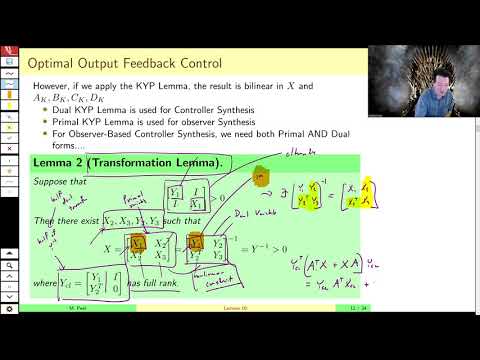
MAE509 (LMIs in Control): Lecture 10, part B - The Variable Transformation Lemma
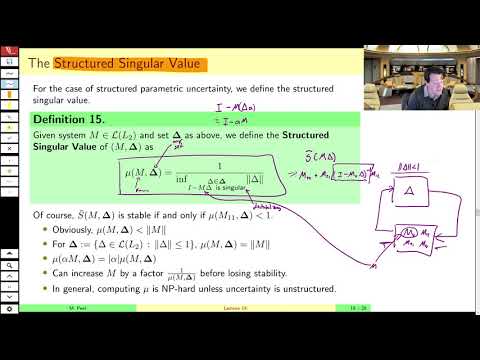
MAE509 (LMIs in Control): Lecture 14, part C - LMIs for Robust Control with Structured Uncertainty
Robust Control Lecture 5
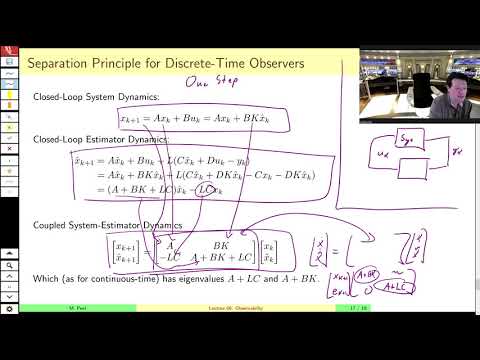
MAE509 (LMIs in Control): Lecture 6, part C - Discrete-Time Observers