MAE509 (LMIs in Control): Lecture 13, part A - Robust and Quadratic Stability
MAE509 (LMIs in Control): Lecture 13, part B - LMIs for Quadratic Stability and Stabilization
MAE509 (LMIs in Control): Lecture 16, part C - Solving SOS problems using LMIs
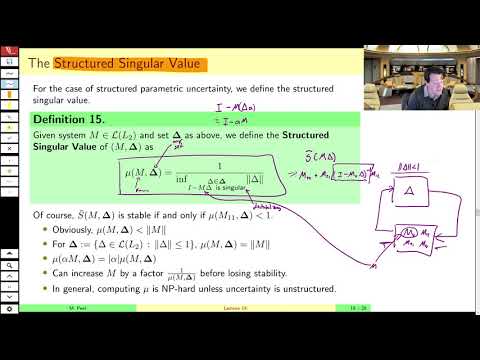
MAE509 (LMIs in Control): Lecture 14, part C - LMIs for Robust Control with Structured Uncertainty
MAE509 (LMIs in Control): Lecture 16, part A - Optimization of Polynomials
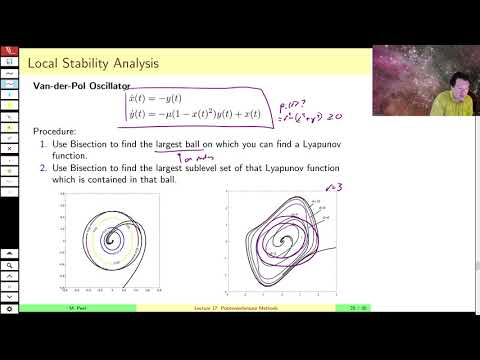
MAE509 (LMIs in Control): Lecture 17, part C - Local Stability Analysis using SOS
MAE509 (LMIs in Control): Lecture 17, part A - Local Polynomial Positivity and the Cone of Inference
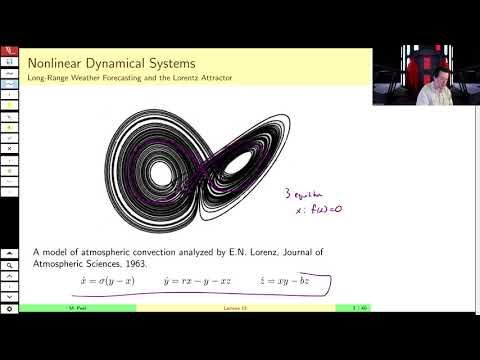
MAE509 (LMIs in Control): Lecture 15, part A - Intro to Nonlinear Systems, Existence and Uniqueness
MAE509 (LMIs in Control): Lecture 5, part D - Controllability in Discrete Time
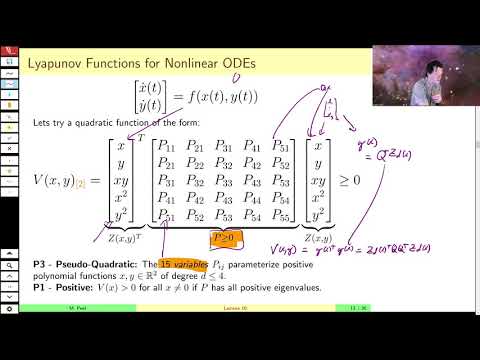
MAE509 (LMIs in Control): Lecture 15, part C - Lyapunov Functions
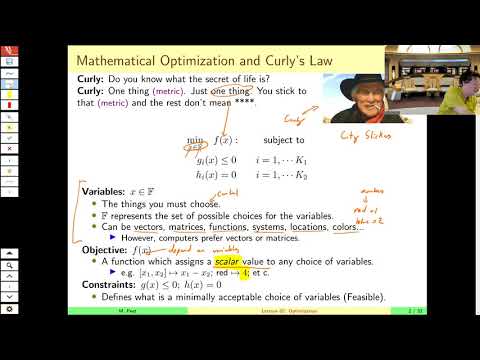
MAE509 (LMIs in Control): Lecture 2, part A - A Minicourse in Optimization
MAE509 (LMIs in Control): Lecture 16, part B - Sum-of-Squares (SOS)
Tutorial: Non-linear dynamics 2
MAE509 (LMIs in Control): Lecture 14, part B - LMIs for Robust Stability and Control using the LFT
MAE509 (LMIs in Control): Lecture 15, part B - Stability of Nonlinear Systems
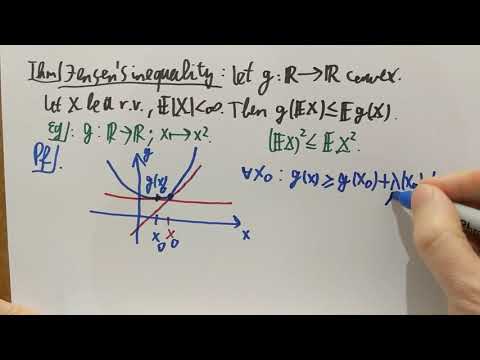
FTiP/7. Jensen's and Ljapunov's inequality
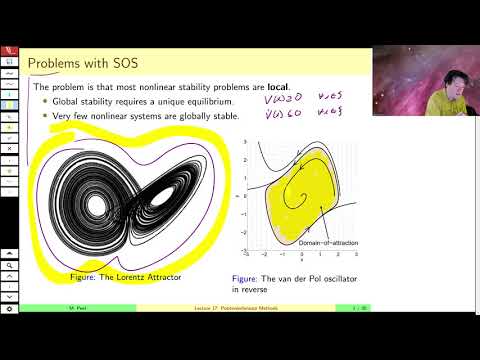
MAE509 (LMIs in Control): Lecture 17, part B - The Dark Art of the Positivstellensatz
Lecture 13a : Stability eigenvalues
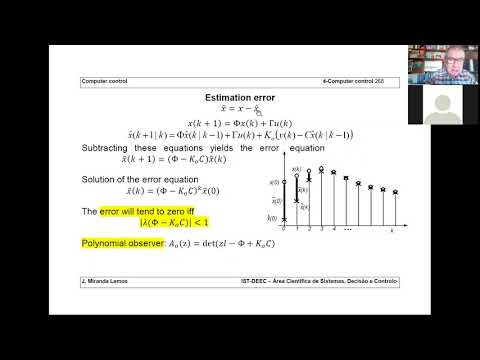
Computer Control Lecture 13 - State observers and the separation theorem
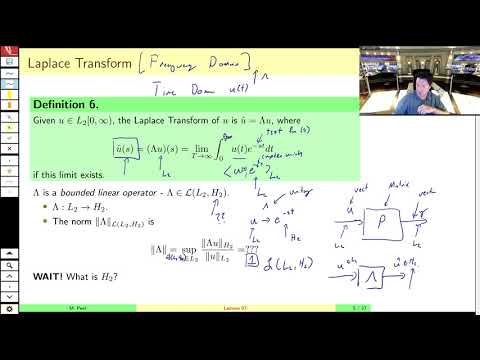
MAE509 (LMIs in Control): Lecture 7, part B - The Laplace Transform and the H_2/H_infty Signal Norms