Harvard AM205 video 3.2 - Numerical integration
Harvard AM205 video 3.1 - Introduction to numerical calculus
Harvard AM205 video 3.3 - Composite quadrature rules
PDE - Chapter VIII - Section 3.2
Harvard AM205 video 4.1 - Introduction to nonlinear equations and optimization
OIP 3.2.6 Ausblick: SQP-Verfahren
Linear Algebra for Statisticians (z + 3. Rayleigh quotient, eigenvalues of the sum of two matrices)
OIP 3.2.5 Das Lagrange-Newton-Verfahren
Graphical Demonstration of Adding Uncertainty in Quadrature for Gaussian-Distributed Variables
Multiplication and Division of Decimal Numbers
PDE - Chapter VIII - Section 3.3
Approaching Nonlinear Systems of Equations
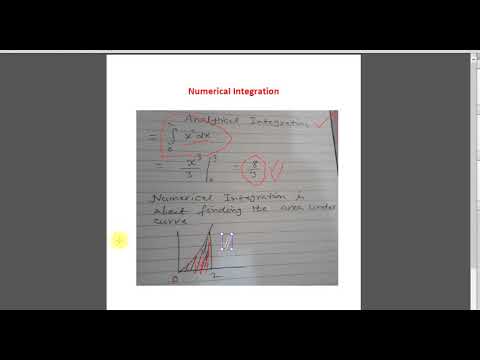
Numerical Integration
Linear Algebra: Intro to Rotation Matrices
Computational Physics Lecture 16, General Linear Least Squares Regression and Non-Linear Regression
3.2.3 Advanced Optimization by Andrew Ng
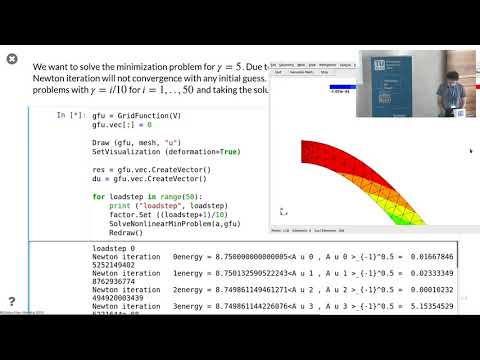
3.8 Nonlinear Minimization Problem
1.4 Piecewise Functions
Quadratic Interpolation, Splines, & Heuristic Interpolation
Stochastic Approximation of Smooth and Strongly Convex Functions
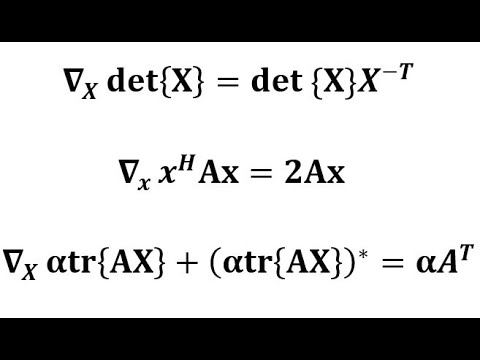
Matrix Calculus: Differentiation With Respect to Vectors and Matrices
Deriving the Variational Form for Poisson's Equation
Solving the Least Squares Problem Using Gradients
6.4.2 Backward error of LU factorization
Computational quantum mechanics, gradient methods and variational Monte Carlo, lecture March 9, 2023