Free-Flyer Acquisition of Spinning Objects with Gecko-Inspired Adhesives - ICRA 2016
Grappling Space Debris with Gecko-inspired Adhesion --- UPDATED
Grasping without Squeezing -- Super Friction Gripper
µTug: Micro robot pulls 2000 times its weight on glass
SplitFlyer: a Modular Quadcoptor that Disassembles into Two Flying Robots
Clamp Break
RI Seminar: Mark Cutkosky : Bio-Inspired Dynamic Surface Grasping
Super wrinkle test of EAP
Rope Caging and Grasping
CeilingQuadOutside
Stickybot: Climbing Smooth Vertical Surfaces with Directional Adhesion
Autonomous Perching and Take-off for a Quadrotor on a Smooth Vertical Wall
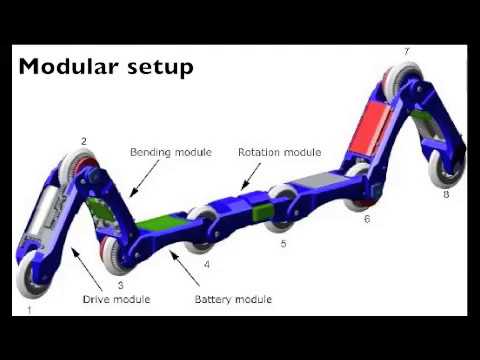
PIRATE - ICRA 2011
Tip Force Sensing Needle in Tissue Phantom
Skyline-based Localisation ICRA 2016
ICRA 2008 Planetary Contingency
2007 ICRA video
Tactile Sensing for Small Legged Robots - Bipedal Running Experiments
Tether-Based SLAM @ UTIAS (ICRA 2016)
"Interactive computational imaging for deformable object analysis" ICRA 2016 Trailer Clip Unnarrated