Fall 2018 GRASP Seminar Series: Mark Cutkosky - November 2nd
Prof. Mark Cutkosky Stanford University: 3D Digital Fabrication for bioinspired designs
Robust Manipulation in Clutter - Mark Cutkosky
Selectively Soft Robotics: Integration Smart Materials in Soft Robotics by Mark Cutkosky
Mark Cutkosky - Teamwork and valorisation
Conferenza stampa alla Camera dei Deputati - Mark Cutkosky
Mark Cutkosky, Wilson Ruotolo, Dane Brouwer "Robotic Hand With A Gecko-Like Grip"
RI Seminar: Matei Ciocarlie : Versatility in Robotic Manipulation: the Long Road to Everywhere
COROMA ONLINE COURSE: Learning to Grasp
Robert Haschke: Tactile Sensors and Tactile Processing for Human Data Acquisition and Robot Grasping
Improving Industrial Grippers with Adhesion-Controlled Friction
Virtual Ephs: Lifelong Learning Lecture with Professor Lee Park | SoA Bicentennial
Frame Analysis using GRASP Part 01
【ROSCon2018】Accelerated robot training through simulation with ROS and Gazebo
Online Interactive Perception and Compliant Grasping. Oliver Brock. TUBerlin Germany
RI Seminar: M. Ani Hsieh : Exploiting the Environment to Improve Autonomy
Jing Xiao - "Autonomous Robotic Manipulation"
The new robotics revolution: what does it mean for us biologicals? | Carl Clement | TEDxCanaryWharf
Prosthesis Grasping - Tactile Feedback
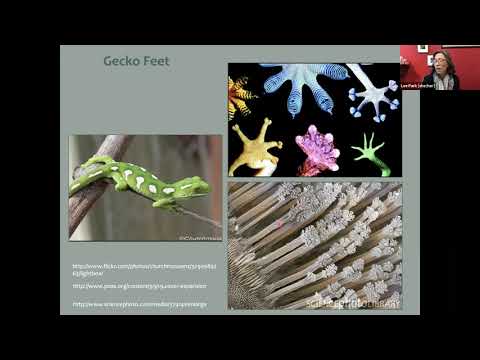
Inspiration from Gecko to Gecko tape (SciVid 2017-G)
Danica Kragic - Seeing, caging, grasping
#2 - Robot Grasping for New Objects with Dr. Juxi Leitner
Nanovation 2017 - Gecko Tape Phone Case
Capillary-based microfluidic device for accelerated screening
Dr. Timothy Kowalewski - To Err is Human - Surgical Skill and Robotics