ECE320 Lecture7-3a: Discrete-Time Systems - Inverse z-Transforms
ECE320 Lecture7-2b: Discrete-Time Systems: z-Transforms
ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
ECE320 Lecture7-3b: Discrete-Time Systems - Inverse z-Transforms
ECE320 Lecture7-3c: Discrete-Time Systems - Inverse z-Transforms
ECE320 Lecture10-2c: Discrete-time Systems Design
ECE320 Lecture 9-1b: Discrete-Time System Design - State Equations
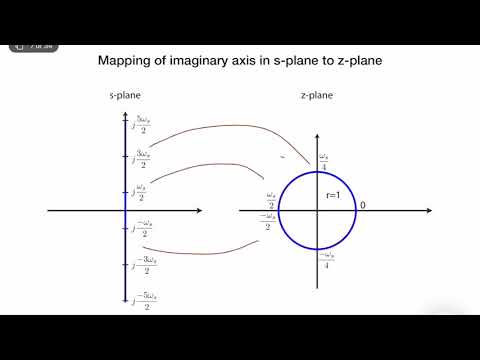
Discrete-Time-Systems - Mapping Between s & z planes (Lecture 7 - Part I)
ECE320 Lecture 9-1a: Discrete-Time System Design - State Equations
Discrete-Time-Systems - Jury Stability Test - Low Order Systems (Lecture 8 - Part I)
Discrete-Time Systems - Z-transforms of elementary signals (Lecture 2 - Part II)
Discrete Time Signal Lec03 (Part-1)
ECE320 Lecture4-3a: Frequency Response Design - Pole and Zero Placement
ECE320 Lecture 8-1a: Discrete-Times Systems - Solving Difference Equations
ECE320 Lecture4-3b: Frequency Response Design - Pole and Zero Placement
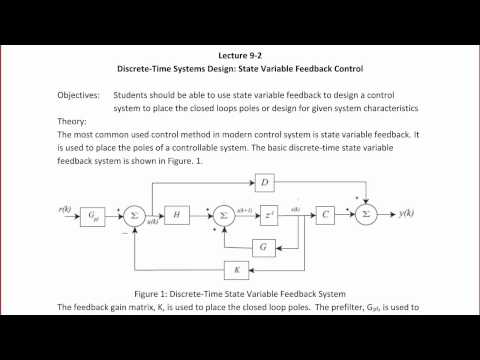
ECE320 Lecture 9-2a: Discrete-Time Systems - State Variable Feedback Control
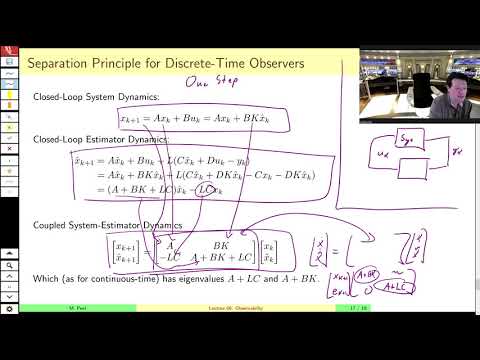
MAE509 (LMIs in Control): Lecture 6, part C - Discrete-Time Observers
ECE320 Lecture 8-1b: Discrete-Times Systems - Solving Difference Equations
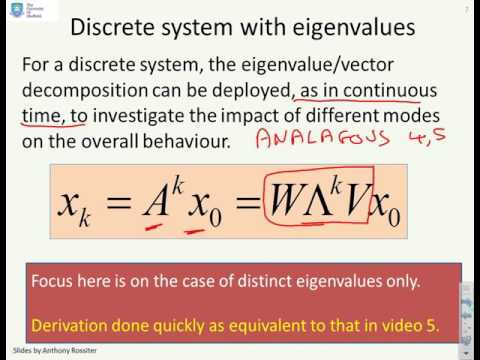
State space behaviours 7 - discrete systems
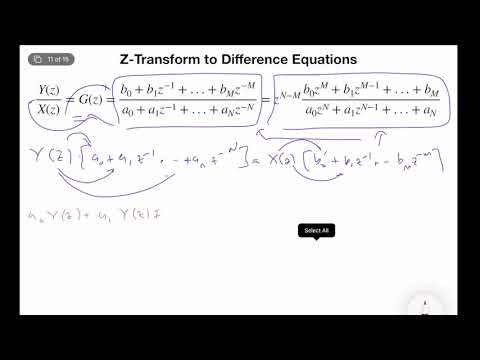
Discrete-Time-Systems - Difference Eq. & Z-transform (Lecture 3 - Part 3)