ECE320 Lecture4-3c: Frequency Response Design - Pole and Zero Placement
ECE320 Lecture4-3a: Frequency Response Design - Pole and Zero Placement
ECE320 Lecture4-3d: Frequency Response Design - Pole and Zero Placement
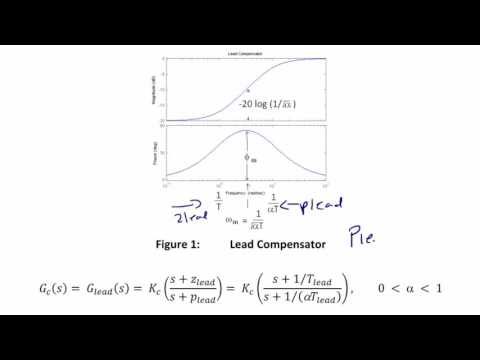
ECE320 Lecture5-2a: Frequency Response Design: Lead Compensation
ECE320 Lecture 5-3c: Lead and Lag Compensation
ECE320 Lecture5-2c: Frequency Response Design: Lead Compensation
FREQUENCY RESPONSE DESIGN VIA LEAD COMPENSATOR PART 4
ECE320 Lecture 5-3b: Lead and Lag Compensation
ECE320 Lecture5-3a: Lead and Lag Compensation
ECE320 Lecture5 3d: Lag and Lag-Lead Compensation Design
ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
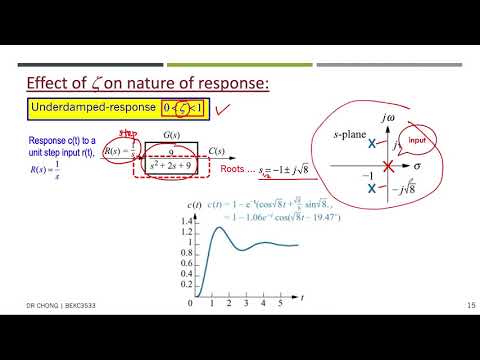
3-1 Time Response (C)
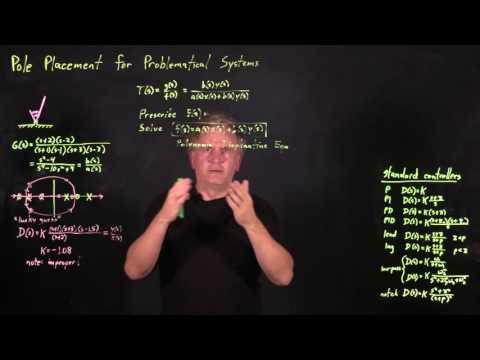
Pole placement for problematical systems
Control Design Using System Type
17EC01045 - Lab 6 - High Pass Filter design using pole zero placement method
l5v4 Using zero order hold on a transfer function converting digital to analog and back to digital
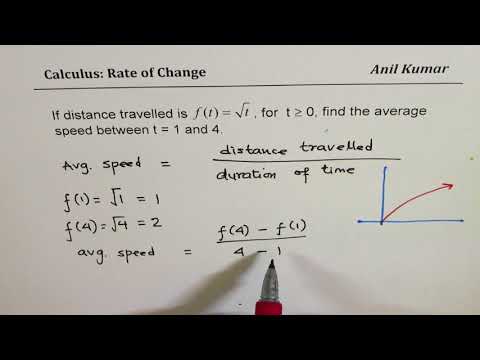
Find average speed for square root displacement function in closed interval AP Calculus
Lead-lag compensation Part 5
Lead Lag Compensator and PID controller
Lag-Lead-Lead-Lag Compensator (Mag and Phase) - Control Systems