ECE320 Lecture4-3a: Frequency Response Design - Pole and Zero Placement
ECE320 Lecture4-3c: Frequency Response Design - Pole and Zero Placement
ECE320 Lecture4-3d: Frequency Response Design - Pole and Zero Placement
ECE320 Lecture4-3b: Frequency Response Design - Pole and Zero Placement
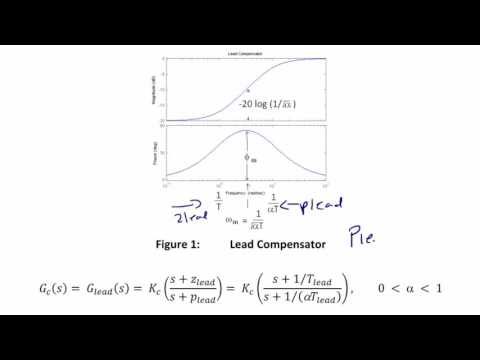
ECE320 Lecture5-2a: Frequency Response Design: Lead Compensation
ECE300 Lecture 4-1: Frequency Response
ECE320 Lecture5-3a: Lead and Lag Compensation
ECE320 Lecture4-2b: Root Locus Design - Lag and Lead Compensators
ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
شرح مع الامثلة لموضوع explain with problems Lead Compensator design
ECE320 Lecture 5-3b: Lead and Lag Compensation
Second Design Example X: Using a lag compensator to reduce the steady state error, 15/4/2015
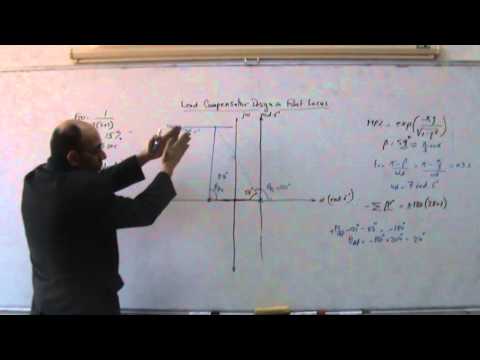
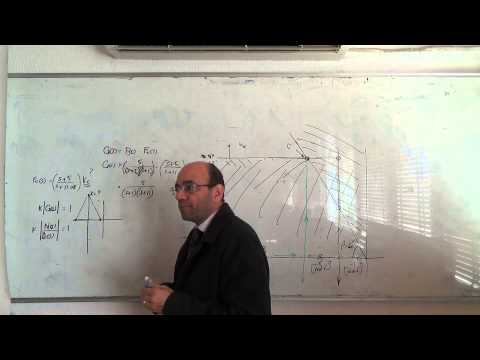
The Root Locus Method, Part XV: Graphical solution of lead compensator design, 7/1/2013
First Design Example III: Design of a lead compensator, 15/12/2014
First Design Example V: Adding a lag compensator, 15/12/2014
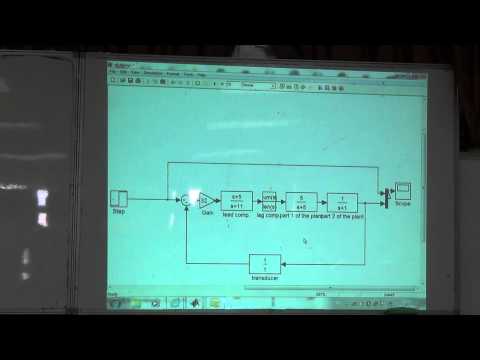
Phase Lead Controller Design
Second Design Example VIII: Designing the lead compensator and finding the gain Kc, 15/4/2015
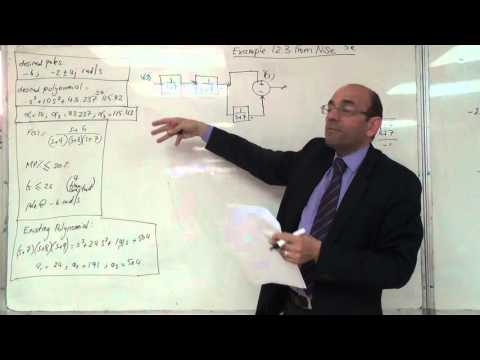
Example 12.3 from N Nise on Pole Placement from User Requirements (c), 6/4/2016
State Space Representation For Discrete Time Systems 2 | Digital Control
Example 12.3 from N Nise on Pole Placement from User Requirements (f), 6/4/2016