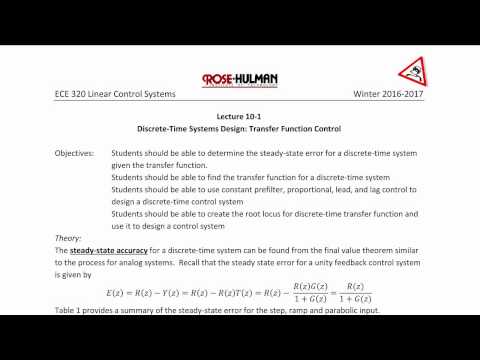
ECE320 Lecture10-1c: Discrete-Time Systems - Transfer Function Control
ECE320 Lecture10-1a: Discrete-Time Systems - Transfer Function Control
ECE320 Lecture10-2c: Discrete-time Systems Design
ECE320 Lecture7-1a: Discrete-time Systems: Convolution System
ECE320 Lecture 8-2: Discrete-Time Systems Analysis - Stability, Settling Time
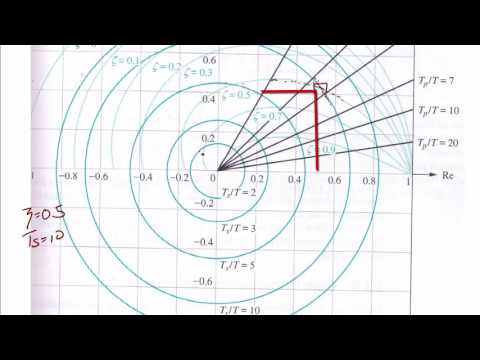
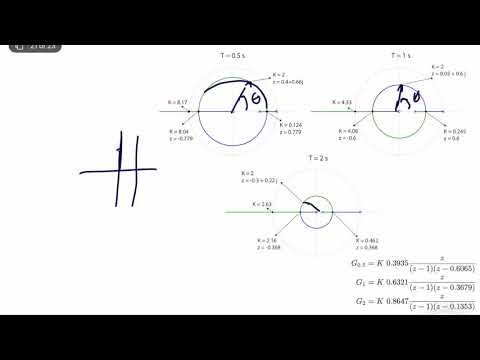
Discrete-Time-Systems - Root-Locus (Lecture 10 - Part 1)
ECE320 Lecture10-2b: Discrete-time Systems Design
ECE320 Lecture10-1b: Discrete-Time Systems - Transfer Function Control
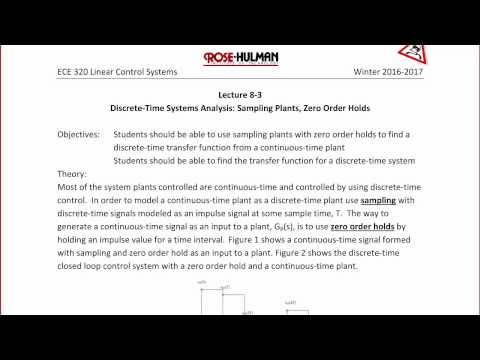
ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
ECE320 Lecture7-2a: Discrete-Time Systems: z-Transforms
Discrete-time systems root locus
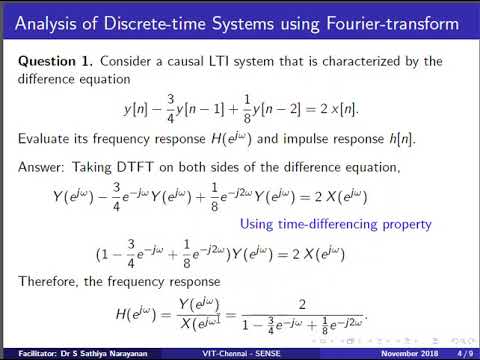
Analysis of Discrete-time Systems - Example Problems
Discrete Time Control System: State Space Model for Discrete time Control System (Part 1)
ECE320 Lecture7-2b: Discrete-Time Systems: z-Transforms
ECE320 Lecture 8-3b: Discrete-Time Systems - Sampling Plants, Zero Order Holds
Lecture 10
ECE320 Lecture7-1b: Discrete-Time Systems: Convolution Sum
ECE320 Lecture 9-1b: Discrete-Time System Design - State Equations
Discrete-Time-Systems - Root-Locus Analysis of a Digital Control System (Lecture 10 - Part ||)
Discrete control #1: Introduction and overview