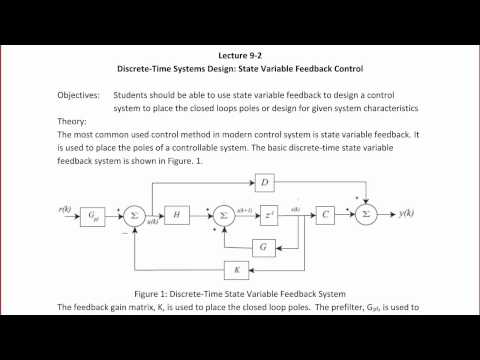
ECE320 Lecture 9-2a: Discrete-Time Systems - State Variable Feedback Control
ECE320 Lecture10-2a: Discrete-time Systems Design
ECE320 Lecture 8-2: Discrete-Time Systems Analysis - Stability, Settling Time
ECE320 Lecture7-2a: Discrete-Time Systems: z-Transforms
ECE320 Lecture 9-1b: Discrete-Time System Design - State Equations
ECE320 Lecture 9-1a: Discrete-Time System Design - State Equations
ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
Discrete-Time-Systems - Steady State Response to Disturbances II (Lecture 9 - Part V)
ECE320 Lecture10-2c: Discrete-time Systems Design
ECE320 Lecture7-1a: Discrete-time Systems: Convolution System
ECE320: Lecture7-1c: Discrete-Time Systems: Convolution Sum
ECE320 Lecture10-2d: Discrete-Time Systems Control
State Space Representation for Discrete Time Systems | Digital Control
Discrete-Time-Systems - Open-Loop-Transfer Function Examples for SS Error (Lecture 9 - Part |II)
ECE320 Lecture7-2b: Discrete-Time Systems: z-Transforms
Discrete-Time Systems - System Representations (Lecture 1 - Part II)
Discrete-Time-Systems - Steady State Error (Lecture 9 - Part I)
Lecture-4: MCT: State Space Model
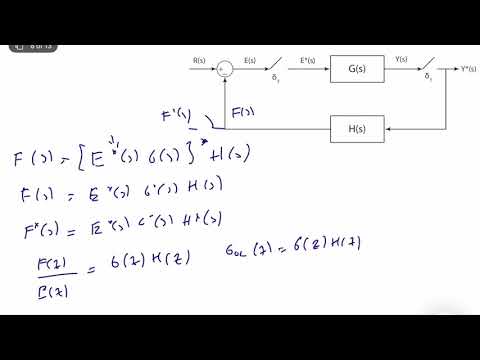
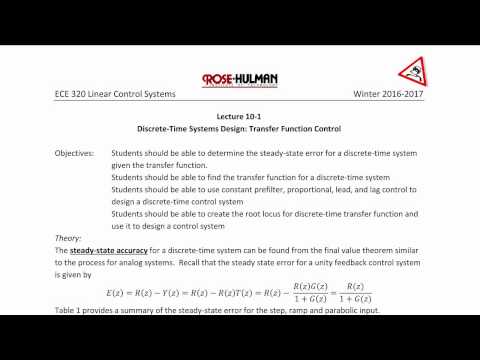
ECE320 Lecture10-1a: Discrete-Time Systems - Transfer Function Control
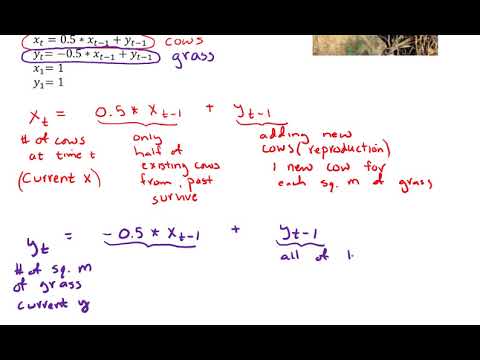
Example for how to set-up a simulation (discrete-time model) with 2 variables