ECE320 Lecture 9-1a: Discrete-Time System Design - State Equations
ECE320 Lecture 9-1b: Discrete-Time System Design - State Equations
ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
ECE320 Lecture10-2a: Discrete-time Systems Design
ECE320 Lecture10-1a: Discrete-Time Systems - Transfer Function Control
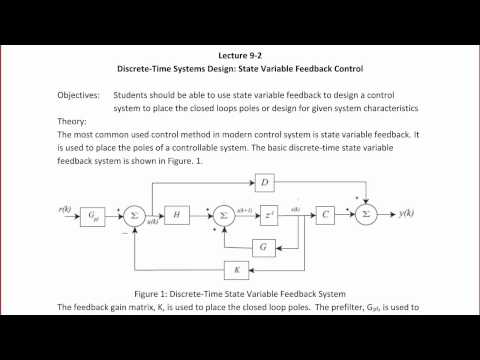
ECE320 Lecture 9-2b: Discrete-Time Systems - State Variable Feedback
ECE320 Lecture10-2c: Discrete-time Systems Design
ECE320 Lecture7-1a: Discrete-time Systems: Convolution System
ECE320 Lecture 9-2a: Discrete-Time Systems - State Variable Feedback Control
PolePlacementLecture
ECE320 Lecture7-2a: Discrete-Time Systems: z-Transforms
ECE320 Lecture10-2d: Discrete-Time Systems Control
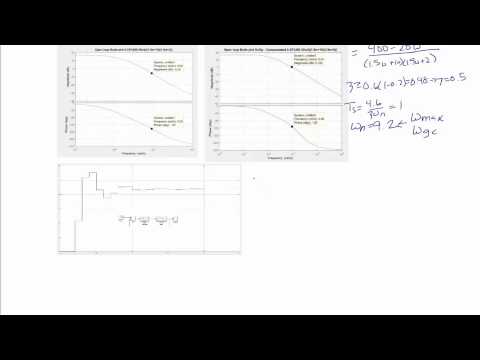
Discrete Time Lead Controller by Engr. Linta Khalil
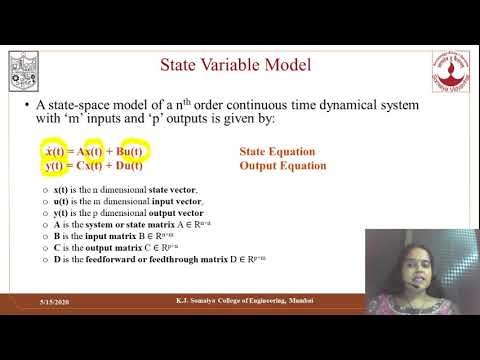
State Space Representation for Discrete Time Systems | Digital Control
Discrete Time Control System: State Space Model for Discrete time Control System (Part 1)
Digital control 19: Equivalent discrete-time plant models with dead-time
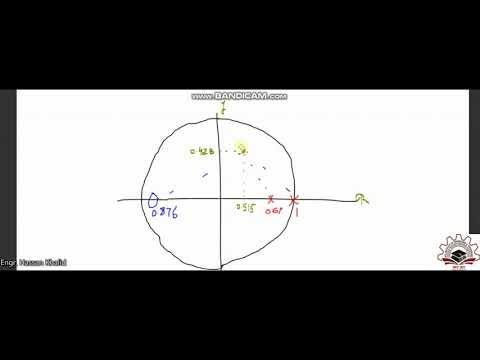
L18D: Discrete-Time Stability
ECE320 Lecture7-2b: Discrete-Time Systems: z-Transforms
Digital Control System: Controller designing based on root locus method
L6P4: DISCRETE TIME SYSTEMS MODELS
State space equations for discrete control systems
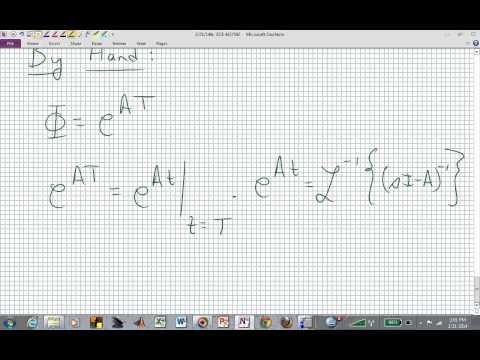
L12A: Discrete-Time State Solution
ece442_vid_2_21_14b
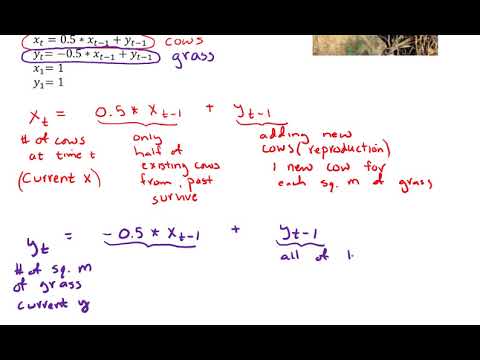
Example for how to set-up a simulation (discrete-time model) with 2 variables
ECE320 Lecture 8-3b: Discrete-Time Systems - Sampling Plants, Zero Order Holds