ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
ECE320 Lecture 8-2: Discrete-Time Systems Analysis - Stability, Settling Time
ECE320 Lecture 8-3b: Discrete-Time Systems - Sampling Plants, Zero Order Holds
Discrete-Time-Systems - Jury Stability Test - Low Order Systems (Lecture 8 - Part I)
ECE320 Lecture 8-1a: Discrete-Times Systems - Solving Difference Equations
ECE320 Lecture10-2c: Discrete-time Systems Design
ECE320 Lecture10-2d: Discrete-Time Systems Control
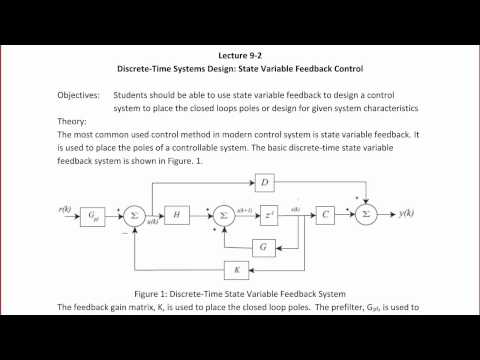
ECE320 Lecture 9-2b: Discrete-Time Systems - State Variable Feedback
Discrete control #3: Designing for the zero-order hold
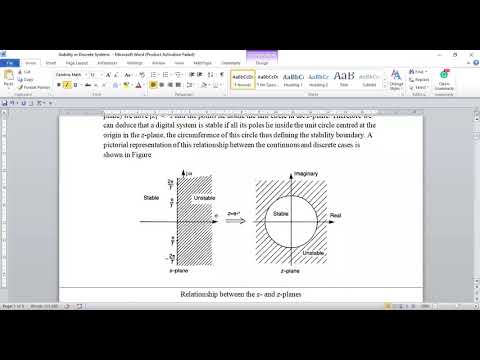
Stability in Discrete-Time Systems 1 | Digital Control
L6P4: DISCRETE TIME SYSTEMS MODELS
ECE320 Lecture 9-2a: Discrete-Time Systems - State Variable Feedback Control
ECE320 Lecture 8-1b: Discrete-Times Systems - Solving Difference Equations
ECE320 Lecture 9-1b: Discrete-Time System Design - State Equations
Analysis of Discrete Data Lesson 11: Structural and Sampling Zeros part 3
ECE320 Lecture 9-1a: Discrete-Time System Design - State Equations
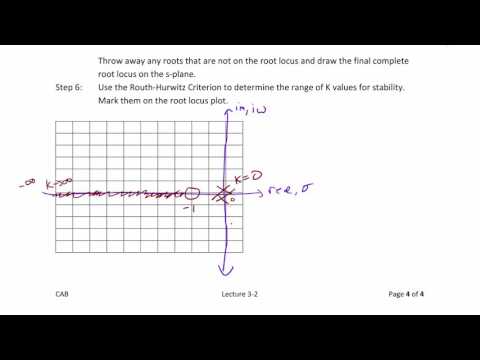
ECE320 Lecture 3-2c: Root Locus Analysis
Discrete-Time-Systems - Analysis of a Fundamental Digital Control System (Lecture 6 - Part III)
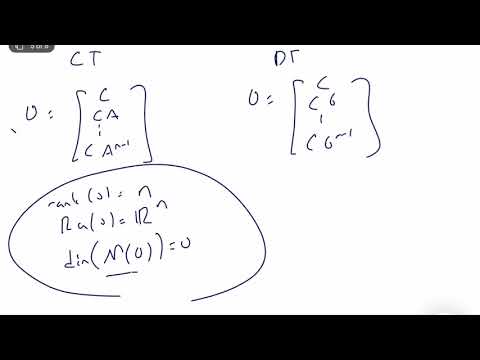
Discrete-Time-Systems - Observability (Lecture 15 - Part II)
LECTURE 8: ROOT LOCUS PLOTS