ECE320 Lecture 8-1c: Discrete-Times Systems - Solving Difference Equations
ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
ECE320 Lecture 8-2: Discrete-Time Systems Analysis - Stability, Settling Time
ECE320 Lecture 8-1b: Discrete-Times Systems - Solving Difference Equations
ECE320 Lecture7-1a: Discrete-time Systems: Convolution System
Discrete-Time-Systems - Jury Stability Test - Low Order Systems (Lecture 8 - Part I)
Digital control 8: Stability of discrete-time systems
ECE320 Lecture 8-3b: Discrete-Time Systems - Sampling Plants, Zero Order Holds
ECE320 Lecture10-1a: Discrete-Time Systems - Transfer Function Control
ECE320 Lecture10-2c: Discrete-time Systems Design
ECE320 Lecture 9-2b: Discrete-Time Systems - State Variable Feedback
ECE320 Lecture7-2a: Discrete-Time Systems: z-Transforms
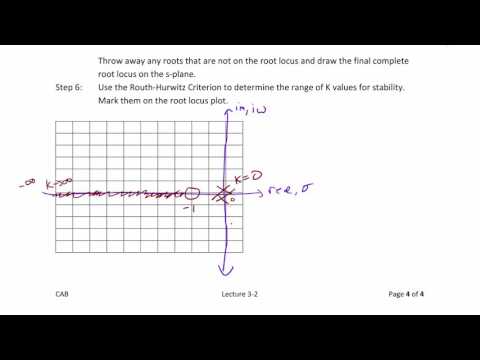
ECE320 Lecture 3-2c: Root Locus Analysis
ECE320 Lecture10-1c: Discrete-Time Systems - Transfer Function Control
Discrete control #3: Designing for the zero-order hold
ECE320 Lecture 9-1b: Discrete-Time System Design - State Equations
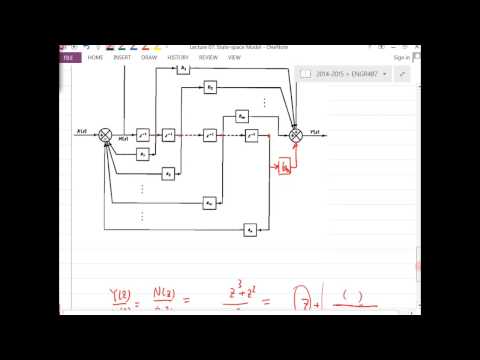
2014W ENGR487 Lecture07 Discrete State-space Model from pulse transfer function
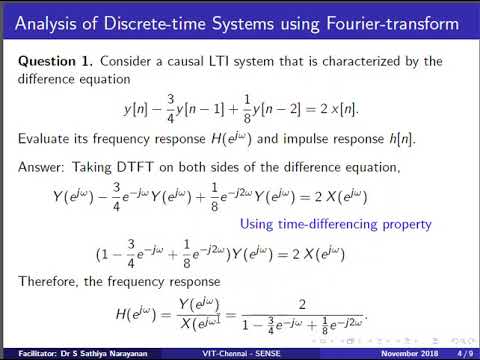
Analysis of Discrete-time Systems - Example Problems
Discrete control #1: Introduction and overview
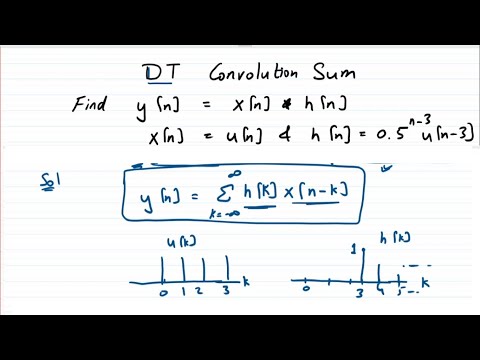
Convolution Sum: Solving Example and Understanding the Solution
Digital control 19: Equivalent discrete-time plant models with dead-time
Digital control, lecture unit 8 (ch. 4.6/Internal model control, ch. 5/Discrete-time state space)
Discrete-Time Dynamical Systems
Response of Discrete Time Systems to discrete input signal
Lecture5: Responses of Discrete-time Systems