ECE320 Lecture 8-1a: Discrete-Times Systems - Solving Difference Equations
ECE320 Lecture 8-3a: Discrete-Time Systems - Sampling Plants, Zero Order Holds
ECE320 Lecture 8-2: Discrete-Time Systems Analysis - Stability, Settling Time
ECE320 Lecture7-1a: Discrete-time Systems: Convolution System
ECE320 Lecture 8-1c: Discrete-Times Systems - Solving Difference Equations
ECE320 Lecture 8-1b: Discrete-Times Systems - Solving Difference Equations
ECE320 Lecture 8-3b: Discrete-Time Systems - Sampling Plants, Zero Order Holds
ECE320 Lecture10-1a: Discrete-Time Systems - Transfer Function Control
ECE320 Lecture10-2a: Discrete-time Systems Design
ECE320 Lecture10-2d: Discrete-Time Systems Control
ECE320 Lecture7-2a: Discrete-Time Systems: z-Transforms
ECE320 Lecture 9-1a: Discrete-Time System Design - State Equations
ECE320 Lecture10-2c: Discrete-time Systems Design
Discrete-Time Systems in the Time Domain
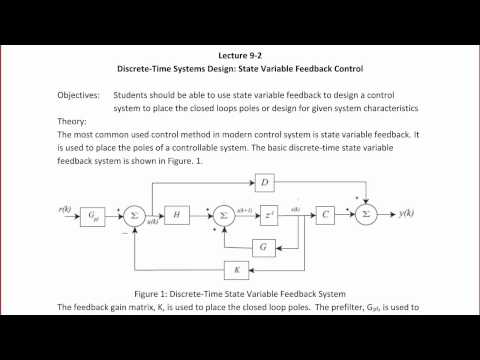
ECE320 Lecture 9-2b: Discrete-Time Systems - State Variable Feedback
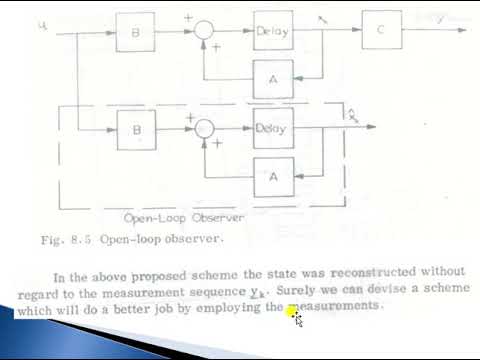
Discrete observer part 1
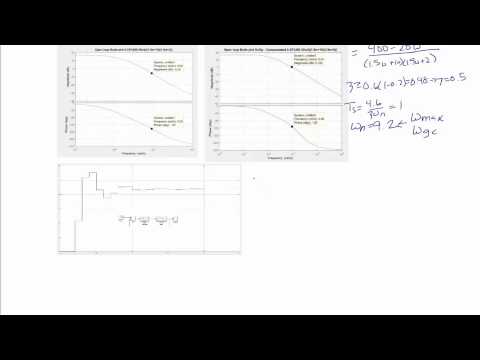
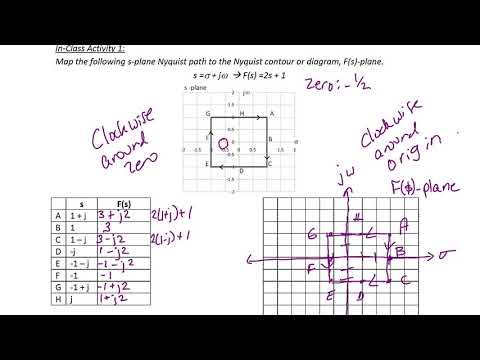
ECE320 Lecture 10-1: Nyquist Plots
ECE320 Lecture 9-1b: Discrete-Time System Design - State Equations
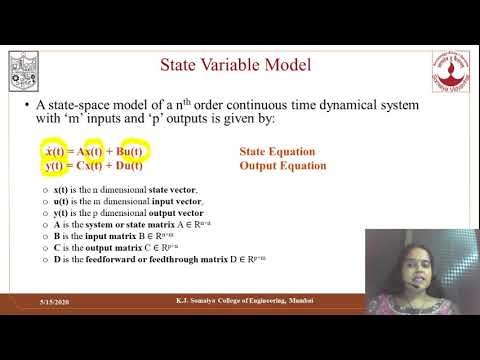
State Space Representation for Discrete Time Systems | Digital Control
State space equations for discrete control systems
ECE320 Lecture 9-2a: Discrete-Time Systems - State Variable Feedback Control
Response of Discrete Time Systems to discrete input signal
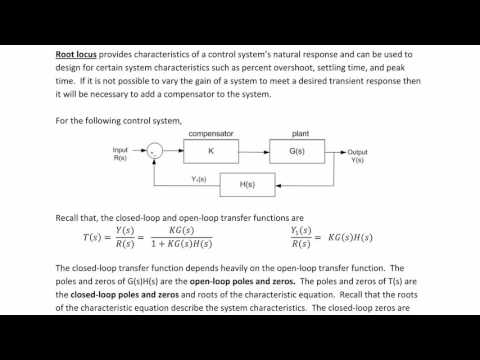
ECE320 Lecture3-2a: Root Locus Analysis
ece442_vid8.3_05_04_2014
Control (Discrete-Time): Command Following (Lectures on Advanced Control Systems)