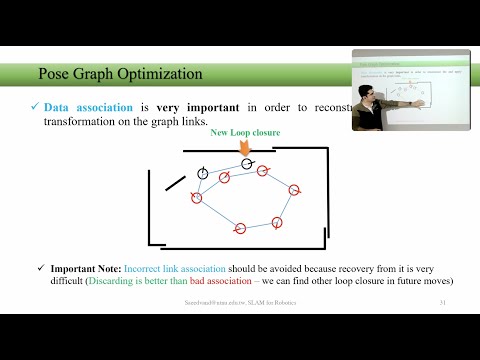
CH13 SLAM for Robotics Course - ORB-SLAM algorithm details, Pose Graph Optimization, (SIFT, ORB)
Lecture 16: Princeton: Introduction to Robotics | "SLAM"
Lecture 19-SLAM I
CH7 SLAM for Robotics - Mapping Extended Kalman Filter (EKF) to SLAM
CH1 SLAM for Robotics - Introduction to Mapping (2023 class)
Understanding SLAM (Simultaneous Localization And Mapping)
Understanding SLAM Using Pose Graph Optimization | Autonomous Navigation, Part 3
Introduction To SLAM | Robotics 5 - 1 | Software Training Fall 2021
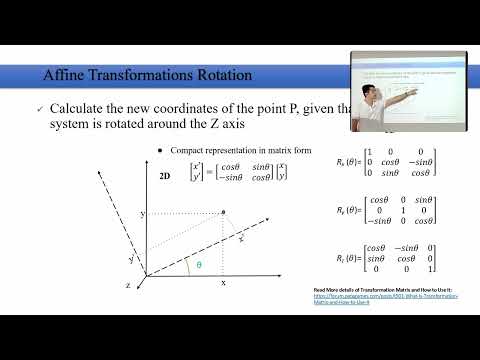
CH2 SLAM for Robotics - Introduction to Coordinates
Wolfram Burgard, Giorgio Grisetti, and Cyrill Stachniss: Graph-based SLAM in 20 Minutes
Practical Robotics Chapter 13 - Autonomous Path Planning
SSRRSS'12: Mapping and SLAM
Visual and LIDAR based SLAM with ROS using Bittle and Raspberry Pi
SLAM++ introduction
Visual Navigation with ORB-SLAM
CH6 SLAM for robotics - Measurement Models, Markov Localization,and EKF Localization
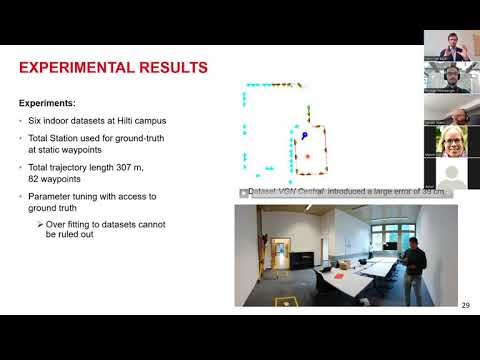
Ray-SLAM: a 2D Localization Algorithm for Construction Robots
Create ROS Nodes for Custom SLAM (Simultaneous Localization and Mapping) Algorithms
Introduction to SLAM from a Photogrammetric Perspective (Cyrill Stachniss)
ORB SLAM 3 demo with RealSense 435 monocular camera